Jaki jest kurs i namiar? Wyznaczanie kierunków na morzu. Konwencje stosowane w zadaniach nawigacyjnych
Podstawą do określenia kierunków ruchu statku i otaczających go obiektów są główne kierunki: N, S, E, W. Każdy z tych głównych kierunków można przyjąć jako początek liczenia kierunku. W nawigacji tradycyjnie za początek obliczania kierunków przyjmuje się północną lub południową część linii prawdziwego południka (linię południową). Kierunki względem linii południa wyznaczane są za pomocą różnych systemów zliczania w zależności od charakteru rozwiązywanych problemów nawigacyjnych z dokładnością do 0,1 ′ .
Aby określić kierunek w płaszczyźnie prawdziwy horyzont Stosowane są trzy systemy podziału horyzontów: kołowy, półkolisty i ćwiartkowy.
System okrężny do liczenia kierunków
W układzie kołowym za początek obliczania kierunków przyjmuje się północną (północną) część prawdziwej linii południka. W tym systemie cała płaszczyzna prawdziwego horyzontu jest podzielona na 360°. Kierunki liczone są od północnej części prawdziwego południka zgodnie z ruchem wskazówek zegara od 0° do 360°. System nie podaje wartości ujemnych.Kształt nagrywania: 37,4°.
W nawigacji dominuje kołowy system liczenia kierunków, który służy do wyznaczania kierunku ruchu statku oraz kierunków do obiektów widocznych ze statku.
Zgodnie z tym systemem skale wszystkich wskaźników kursu i przyrządów służących do wyznaczania kierunków na morzu są podzielone na statkach.
Okrągły system liczenia kierunków jest prostszy i bardziej wizualny niż inne, ale nawigator musi umieć przełożyć wskazówki podane przez jeden system na wskazówki innego systemu, ponieważ przy rozwiązywaniu wielu problemów nawigacyjnych i astronomicznych uzyskuje się wyniki wskazujące nazwę kwartał.
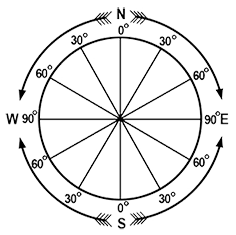
Półokrągły system liczenia kierunku
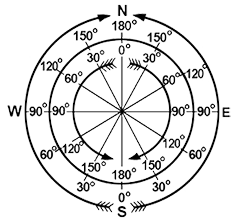 W układzie półkolistym prawdziwa płaszczyzna horyzontu jest podzielona linią NS na dwie części po 180° każda. Zarówno północna (N), jak i południowa (S) część prawdziwej linii południka są brane za punkt wyjścia do liczenia kierunków (0°). We wszystkich przypadkach liczenie odbywa się do osi (E) lub na zachód (W) od 0° do 180°.
W układzie półkolistym prawdziwa płaszczyzna horyzontu jest podzielona linią NS na dwie części po 180° każda. Zarówno północna (N), jak i południowa (S) część prawdziwej linii południka są brane za punkt wyjścia do liczenia kierunków (0°). We wszystkich przypadkach liczenie odbywa się do osi (E) lub na zachód (W) od 0° do 180°. Aby uniknąć dwuznaczności, kierunkom w półkolistym systemie liczenia nadano nazwy:
Po pierwsze, litery N lub S oznaczają tę część prawdziwego południka, od której mierzony jest kierunek;
- wtedy liczby pokazują wartość kąta w stopniach;
- na końcu zapisu litera E lub W wskazuje kierunek, w którym dokonywane jest przeliczenie.
Zrób to, dodając lub odejmując odchylenie magnetyczne od rzeczywistych kierunków. W prawdziwym świecie lotnictwa życie jest nieco bardziej skomplikowane. Wiatry powierzchniowe są podawane w oparciu o północ magnetyczną, a wiatry w powietrzu w oparciu o północ rzeczywistą. Ponieważ jednak piloci symulatorów lotu podczas planowania lotu uzyskują przede wszystkim informacje o kursach magnetycznych, północ magnetyczna dla wiatrów powietrznych ułatwiła nasze obliczenia, eliminując jeden współczynnik konwersji.
Był to ogromny przełom dla linii lotniczych, który umożliwił im tworzenie rozkładów lotów bez względu na pogodę. Przeczytaj, jak to wszystko się zaczęło, w następnej sekcji. Dowiedz się o wczesnym rozwoju pomocy nawigacyjnych. Pioneer nabierze nowego znaczenia. Czy powinniśmy utrzymać, zreformować, usunąć, zastąpić kursy filozofii w szkole? Redaktor naczelny Beatrice Delvaux poprosiła mnie, żebym została „czerwoną nicią” wieczoru.
Na przykład: N65°E, S135°W.
System liczenia w kierunku ćwierćdolarowym
 W systemie ćwiartkowym płaszczyzna prawdziwego horyzontu jest podzielona na cztery ćwiartki liniami NS i EW: NE, SE, SW i NW.
W systemie ćwiartkowym płaszczyzna prawdziwego horyzontu jest podzielona na cztery ćwiartki liniami NS i EW: NE, SE, SW i NW. Za punkt początkowy liczenia kierunków (0°) przyjmuje się północną (N) lub południową (S) część południka prawdziwego. Liczenie przeprowadza się od N lub S w kierunku E lub W od 0° do 90° w każdym kwartale:
W ćwiartkach NE od N do E (zgodnie z ruchem wskazówek zegara) od 0° do 90°;
- w ćwiartce SE od S do E (w kierunku przeciwnym do ruchu wskazówek zegara) od 0° do 90°;
- w ćwiartce południowo-zachodniej od S do W (zgodnie z ruchem wskazówek zegara) od 0° do 90°;
- w ćwiartce NW od N do W (w kierunku przeciwnym do ruchu wskazówek zegara) od 0° do 90°.
Co cię uderzyło w naszej debacie? Na początku uderzyła mnie kwestia tak zwanych kursów „filozoficznych”, ponieważ segregują studentów. Kolejną poważną krytyką tych kursów jest ich spójność. Kiedy więc mówimy o obywatelstwie, czy naprawdę mówimy o prawie? Każde z nich jest całkowicie otwarte, całkowicie pluralistyczne i może popaść w relatywizm; albo posypujemy - trochę obywatelstwa, trochę praw człowieka, trochę religii itp. - i w tym przypadku kurs staje się niespójny i nieciekawy.
Krótko mówiąc, widzimy, że nie bardzo wiemy, na której nodze tańczyć. Padła krytyka – i nikt nie kwestionuje nauczycieli: nie o to chodzi, ale nie wiemy dokładnie, jakie cele chcemy postawić nowym kursom. Czy nie spodziewamy się zbyt wielu nowych kursów?
Aby uniknąć dwuznaczności, pisząc kierunki kwartału, należy wskazać nazwę kwartału, w którym ten kierunek się znajduje.
 Na przykład: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
Na przykład: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
W praktyce, jeśli dane kierunki są wskazane w różnych systemach zliczania, to najpierw są one konwertowane do dowolnego systemu. W tym przypadku stosowane są różne schematy przeliczania kierunku, z których jeden pokazano na rysunku.
PRAWDZIWE KURSY I ŁOŻYSKA. KĄT KIERUNKU.
 Aby zapewnić bezpieczeństwo statku na morzu, konieczna jest umiejętność określenia kierunku jego ruchu względem zadanej ścieżki, a także kierunków do zagrożeń nawigacyjnych i punktów orientacyjnych widocznych ze statku.
Aby zapewnić bezpieczeństwo statku na morzu, konieczna jest umiejętność określenia kierunku jego ruchu względem zadanej ścieżki, a także kierunków do zagrożeń nawigacyjnych i punktów orientacyjnych widocznych ze statku. Kierunki na morzu ustalane są względem Prawdziwy południk to południk przechodzący przez lokalizację obserwatora" style="cursor: help; waga czcionki: 800; styl czcionki: kursywa; kolor:#2e44b7; dekoracja tekstu: brak"> prawdziwy południk(N i) i są nazywane prawdziwe kierunki. Znając położenie prawdziwego południka, dowolny kierunek na powierzchni ziemi (morza) można wyznaczyć na podstawie kąta pomiędzy północną częścią tego południka a kierunkiem w stronę obiektu. W tym przypadku wartość tego kąta mierzona jest w stopniach według układu kołowego, tj. od 0° do 360°.
Kierunek ruchu statku wyznacza kurs rzeczywisty.
prawdziwy kurs(IR) to kąt poziomy pomiędzy północną częścią południka prawdziwego a Płaszczyzna średnicowa to pionowa wzdłużna płaszczyzna symetrii kadłuba statku" style="cursor: help; waga czcionki: 800; styl czcionki: kursywa; kolor:#2e44b7; dekoracja tekstu: brak"> płaszczyzna środkowa statku w kierunku jego ruchu, mierząc zgodnie z ruchem wskazówek zegara.
Płaszczyzna średnicy przecinająca się z płaszczyzną Prawdziwy horyzont to płaszczyzna pozioma. przechodząc przez oko obserwatora" style="cursor: help; waga czcionki: 800; styl czcionki: kursywa; kolor:#2e44b7; dekoracja tekstu: brak">prawdziwy horyzont, tworzy linię kursu statku. Zatem prawdziwy kurs IR to kąt pomiędzy północną częścią prawdziwego południka a linią kursu. Rzeczywisty kurs wymiany jest obliczany w okrężnym systemie liczenia.
Nazywa się kierunek od punktu obserwacyjnego do obiektu linia łożyska.
Kierunek ze statku do obiektów naturalnych i sztucznych wyznacza prawdziwy namiar.
Prawdziwe łożysko(IP) to kąt poziomy pomiędzy północną częścią południka prawdziwego a kierunkiem od punktu obserwacyjnego do obiektu, mierzony zgodnie z ruchem wskazówek zegara.
Nazywa się płaszczyznę pionową przechodzącą przez miejsce obserwatora i miejsce obserwowanego obiektu samolot widokowy.
Tworzy się przecięcie płaszczyzny celowania z płaszczyzną prawdziwego horyzontu linia nośna, czyli kierunek do obiektu. Zatem, prawdziwe łożysko(IP) to kąt pomiędzy północną częścią południka prawdziwego a linią namiaru. Namiar rzeczywisty obliczany jest w okrągłym systemie liczenia.
Przy rozwiązywaniu niektórych problemów stosuje się kierunek przeciwny do prawdziwego łożyska. Ten kierunek nazywa się odwróć łożysko prawdziwe(OIP):
OIP = IP + 180°, jeśli IP OIP = IP - 180°, jeśli IP > 180°.
OIP to kąt mierzony zgodnie z ruchem wskazówek zegara od północnej części prawdziwego południka przechodzącego przez punkt orientacyjny w kierunku od punktu odniesienia do statku.
Przy rozwiązywaniu problemów, dla których ma to szczególne znaczenie wzajemne porozumienie zmierzyć kurs statku i obserwowany obiekt kąt kursu(KU) - kąt poziomy pomiędzy płaszczyzną symetrii statku a kierunkiem w stronę obserwowanego obiektu, tj. kąt pomiędzy dziobem osi statku a linią namiaru. Kąt kierunku mierzone w okrągłym lub półkolistym układzie liczenia kierunkowego.
Zasadniczo kąty kursu mierzone są w układzie półkolistym i aby uniknąć dwuznaczności, nadawane są im nazwy wskazujące, po której stronie statku (prawej czy lewej) liczyli.
Na przykład: KU= 15° l/b, KU= 78° p/b.
Podczas rozwiązywania problemów uwzględniane są kąty kursowe prawej burty pozytywny, i uwzględniane są kąty kierunku lewej strony negatywny.
Podczas rozwiązywania niektórych problemów wymagany jest pomiar kąta kursu w rachunku kołowym. W tym przypadku liczenie przeprowadza się od dziobu płaszczyzny środkowej statku w prawo od 0° do 360°. Nazywa się kąt kursu mierzony na rachunku kołowym odniesienie do kąta kursu(OKU).  Zależność między odczytem kąta kursu a kątami kursu określają wyrażenia:
Zależność między odczytem kąta kursu a kątami kursu określają wyrażenia:
OKU = CU p/b;
OKU = 360° - KU l/b
Niektórym wartościom kątów kursu tradycyjnie przypisuje się nazwy. Na przykład KU = 90° - kierunek prostopadły do płaszczyzny środkowej statku - nazywany jest na trawersie.
Matematyczna zależność między prawdziwymi kierunkami:
IP = IR + KU;
IR = IP - KU;
KU = IP - IR.
Obliczając przy pomocy tych wzorów należy pamiętać o konieczności uwzględnienia znaku kąta kursu. Inną cechą jest to, że prawdziwy kurs i prawdziwy namiar nie mogą mieć wartości ujemnych. Jeśli jednak przy rozwiązywaniu problemów otrzyma się ujemną wartość IC lub IP, to należy ją odjąć od 360° i uzyskany wynik uznać za dodatni.
Nazywa się kąt dwuścienny między północną częścią płaszczyzny południka prawdziwego a płaszczyzną pionową pokrywającą się z linią ruchu statku kąt toru(PU).
PRZYKŁADY ROZWIĄZANIA PROBLEMÓW
|
Przykład 1:
Podczerwień = 270°, Rozwiązanie: IP=IR+KU=270°+130°= 400° Ponieważ wynik okazał się większy niż 360°, wówczas od uzyskanego wyniku należy odjąć 360°: 400° - 360° = 40° Odpowiedź: IP = 40°. |
Przykład 2:
Podczerwień = 40°, Rozwiązanie: Ponieważ wówczas kąty po lewej stronie są uważane za ujemne IP=IR+KU=40°+ (-70°)= -30° Ponieważ Jeśli otrzymasz wynik negatywny, do uzyskanej wartości musisz dodać 360°: –30° + 360° = 330° Odpowiedź: IP = 330°. |
Przykład 3:
IP = 340°, Rozwiązanie: KU=IP-IR=340°- 40°=300°pr/b Ponieważ Jeśli wartość KU okaże się większa niż 180°, to od uzyskanego wyniku należy odjąć 360° i zmienić nazwę KU (pr/b) na przeciwną (l/b). 360° - 300° = 60° dł/sz Odpowiedź: KU = 60° l/b. |
DEKLINACJA MAGNETYCZNA. KURSY MAGNETYCZNE I ŁOŻYSKA.
Bieguny magnetyczne Ziemi znajdują się stosunkowo blisko biegunów geograficznych, ale nie pokrywają się z nimi. Ponadto stopniowo zmieniają swoje położenie.Płaszczyzna pionowa przechodząca przez oś swobodnie zawieszonej igły magnetycznej, pod wpływem jedynie sił ziemskiego magnetyzmu, nazywa się płaszczyzna południka magnetycznego, a linia przecięcia tej płaszczyzny z płaszczyzną prawdziwego horyzontu wynosi południk magnetyczny.
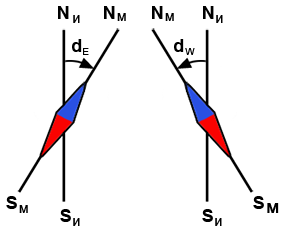 Nazywa się kąt poziomy, o jaki w danym punkcie Ziemi płaszczyzna południka magnetycznego odbiega od płaszczyzny południka prawdziwego deklinacja magnetyczna d. Mierzy się go od północnej części prawdziwego południka N i w kierunku E lub W od 0 do 180°. Jeśli północna część południka magnetycznego N m jest odchylona od N i na wschód, wówczas deklinacja nazywa się E (wschodnia) i przypisuje się jej znak plus (+), jeśli na zachód, to W (zachodnia) z minus (-).
Nazywa się kąt poziomy, o jaki w danym punkcie Ziemi płaszczyzna południka magnetycznego odbiega od płaszczyzny południka prawdziwego deklinacja magnetyczna d. Mierzy się go od północnej części prawdziwego południka N i w kierunku E lub W od 0 do 180°. Jeśli północna część południka magnetycznego N m jest odchylona od N i na wschód, wówczas deklinacja nazywa się E (wschodnia) i przypisuje się jej znak plus (+), jeśli na zachód, to W (zachodnia) z minus (-). W poszczególnych punktach Ziemi deklinacja magnetyczna różni się zarówno wartością, jak i nazwą. Na większości obszarów żeglownych deklinacja nie przekracza 25°E lub W. Wyjątkiem są duże szerokości geograficzne, gdzie deklinacja może sięgać kilkudziesięciu stopni, a nawet 180° pomiędzy biegunem magnetycznym i geograficznym o tej samej nazwie.
Aby prawidłowo korzystać z kompasu magnetycznego, musisz znać deklinację magnetyczną na swoim obszarze żeglowania. W tym celu na mapach nawigacyjnych wskazywana jest wartość i nazwa deklinacji. Jednak obserwacje wykazały, że wartość deklinacji nie pozostaje stała nawet w tym samym miejscu. Na niektórych obszarach deklinacja może zmienić się w ciągu roku nawet o 0,2–0,3°. Dlatego też mapy nawigacyjne wskazują także rok, do którego przypisana jest deklinacja oraz wartość jej rocznej zmiany.
Nazywa się wielkość zmiany deklinacji magnetycznej w ciągu jednego roku roczna zmiana deklinacji magnetycznej i średnie od 0,0° do 0,2°.
Przy każdej pracy z mapą nawigacyjną konieczne jest dostosowanie deklinacji magnetycznej do roku nawigacji. W tym celu do wskazanej na mapie wartości deklinacji magnetycznej (z własnym znakiem) dodać iloczyn wartości zmiany rocznej (również ze swoim znakiem) i liczby lat, jakie upłynęły od roku do którego przypisana jest deklinacja roku faktycznego rejsu, np.:
Mapa wskazuje:
Deklinacja magnetyczna 5,7°E, znormalizowana do 2000 r. Zmiana roczna 0,1° do W.
Wtedy dla żeglugi w roku 2014 deklinacja magnetyczna będzie wynosić:
d 2004 = + 5,7 + [(- 0,1 × (2014 - 2000)] = + 5,7 - 0,1 × 14 = 5,7 - 1,4 = 4,3°.
 Kurs magnetyczny(MK) to kąt w płaszczyźnie prawdziwego horyzontu, mierzony od północnej części południka magnetycznego zgodnie z ruchem wskazówek zegara do dziobu płaszczyzny środkowej statku.
Kurs magnetyczny(MK) to kąt w płaszczyźnie prawdziwego horyzontu, mierzony od północnej części południka magnetycznego zgodnie z ruchem wskazówek zegara do dziobu płaszczyzny środkowej statku. Łożysko magnetyczne(MP) to kąt w płaszczyźnie prawdziwego horyzontu, mierzony od północnej części południka magnetycznego zgodnie z ruchem wskazówek zegara do kierunku do punktu orientacyjnego.
Kąt różniący się od MP o 180° nazywa się odwrotne łożysko magnetyczne(WMP): WMP = MP ± 180° lub MP = WMP ± 180°.
Kursy magnetyczne i łożyska mogą wynosić od 0 do 360°.
Znając deklinację magnetyczną w danym miejscu na Ziemi, można ze znanych kierunków wyznaczyć prawdziwe kierunki magnetyczne, a także rozwiązać zadanie odwrotne. Zależność pomiędzy kierunkiem magnetycznym i rzeczywistym wyrażają wzory:
IR = MK + d; IP = MP + d; OIP = OMP + d;
MK = IR - d; MP = IP - d; BMR = OIP - zm.
ODCHYLENIE KOMPASU MAGNETYCZNEGO. KURSY KOMPASU I ŁOŻYSKA.
Nazywa się linię przecięcia płaszczyzny prawdziwego horyzontu z płaszczyzną pionową przechodzącą przez oś igły magnetycznej, na którą działa siła magnetyzmu ziemskiego i siły magnetyczne żelaza okrętowego południk kompasu.Części stałe oraz inne części stalowe i żelazne statku znajdujące się w polu magnetycznym Ziemi ulegają stopniowemu namagnesowaniu i uzyskują właściwości magnesu. W rezultacie w przestrzeni otaczającej statek pojawia się własne pole magnetyczne, którego działanie łączy się z polem magnetycznym Ziemi. Igła magnetyczna kompasu okrętowego jest ustawiana zgodnie z siłami wypadkowymi obu pól, w wyniku czego odchyla się od kierunku południka magnetycznego.
 Kąt poziomy, o jaki płaszczyzna południka kompasu odchyla się od płaszczyzny południka magnetycznego, nazywa się odchylenie kompasu magnetycznego d.
Kąt poziomy, o jaki płaszczyzna południka kompasu odchyla się od płaszczyzny południka magnetycznego, nazywa się odchylenie kompasu magnetycznego d.Odchylenie mierzone jest od północnej części południka magnetycznego Nm do E (ze znakiem „+”) lub W (ze znakiem „-”) od 0 do 180°.
Na każdym kursie odchylenie kompasów statku jest inne. Wyjaśnia to fakt, że gdy zmienia się kurs, zmienia się położenie żelaza statku względem igieł kompasu magnetycznego. Ponadto po obróceniu statku żelazo statku ulega częściowemu ponownemu namagnesowaniu, co również prowadzi do zmiany pola magnetycznego statku.
 Kurs kompasu (CC) zwany kątem w płaszczyźnie prawdziwego horyzontu, mierzonym od północnej części południka kompasu zgodnie z ruchem wskazówek zegara do dziobu środkowej płaszczyzny statku.
Kurs kompasu (CC) zwany kątem w płaszczyźnie prawdziwego horyzontu, mierzonym od północnej części południka kompasu zgodnie z ruchem wskazówek zegara do dziobu środkowej płaszczyzny statku. Namiar kompasu (CP) nazywany kątem w płaszczyźnie prawdziwego horyzontu, mierzonym od północnej części południka kompasu zgodnie z ruchem wskazówek zegara do kierunku punktu orientacyjnego.
Kąt różniący się od CP o 180° nazywa się odwrócony namiar kompasu OKP: OKP = KP ± 180° lub KP = OKP ± 180° Kursy kompasu i namiar mogą mieścić się w zakresie od 0 do 360°.
Zależność między kompasem a kierunkami magnetycznymi:
MK = KK + d; MP = CP + d; OMP = OKP + d;
KK = MK - d; KP = MP - d; OKP = BMR – zm.
Pomiędzy CC, CP i CG punktów orientacyjnych podczas liczenia okrężnego pozostaje następująca zależność:
KP = KK + KU;
KK = KP - KU;
KU = KP - KK.
KOREKCJA KOMPASU MAGNETYCZNEGO.
 Algebraiczna suma odchylenia i deklinacji magnetycznej o wielkość, o jaką kierunki kompasu różnią się od rzeczywistych, nazywa się korekcją kompasu magnetycznego:
Algebraiczna suma odchylenia i deklinacji magnetycznej o wielkość, o jaką kierunki kompasu różnią się od rzeczywistych, nazywa się korekcją kompasu magnetycznego: Δ K = re + re
Odchylenie i deklinacja są brane pod uwagę przy użyciu ich własnych znaków, a mianowicie:
Jeżeli północny koniec igły magnetycznej jest odchylony od prawdziwego południka w prawo (na wschód), wówczas deklinacja i odchylenie nazywane są wschodnimi i są uważane za dodatnie, tj. są podstawione we wzorach ze znakiem „+”.
Jeżeli północny koniec igły magnetycznej jest odchylony od prawdziwego południka w lewo (na zachód), wówczas deklinacja i odchylenie nazywane są zachodnimi i są uważane za ujemne, tj. są podstawione we wzorach ze znakiem „-”.
Nazywa się problemy związane z przejściem z kursów kompasu i namiarów na prawdziwe korekta rumbów oraz zadania związane z przejściem z prawdziwych kursów i namiarów z mapy na kompasowe - tłumaczenie rumbów.
Formuły korygujące rumby:
IR = KK + d + d lub IR = KK + Δ K
IP = KP + d + d lub IP = KP + Δ K
OIP = OKP + d + d lub OIP = OKP + Δ K
Wzory na przeliczenie rumbów:
KK = IR - d - d lub KK = IR - Δ K
KP = IP - d - d lub KP = IP - Δ K
OKP = OIP - d - d lub OKP = OIP - Δ K
Konwencje stosowane w zadaniach nawigacyjnych
N i - Prawdziwy południk- linia przecięcia płaszczyzny pionowej przechodzącej przez bieguny geograficzne Ziemi i miejsca obserwatora z powierzchnią Ziemi.N m - Południk magnetyczny- linia przecięcia płaszczyzny prawdziwego horyzontu z płaszczyzną pionową przechodzącą przez oś swobodnie zawieszonej igły magnetycznej, na którą działa jedynie siła ziemskiego magnetyzmu.
N do - Południk kompasu- linia przecięcia płaszczyzny prawdziwego horyzontu z płaszczyzną pionową przechodzącą przez oś igły magnetycznej, która znajduje się pod wpływem siły ziemskiego magnetyzmu i sił magnetycznych żelaza okrętowego.
KK - Kurs kompasu- kąt pomiędzy linią południka kompasu Nk a linią kursu.
CP – namiar kompasu- kąt pomiędzy linią południka kompasu Nk a linią namiaru.
MK - Kurs magnetyczny- kąt pomiędzy południkiem magnetycznym N m a linią kursu.
MP - Łożysko magnetyczne- kąt między południkiem magnetycznym N m a linią namiaru.
Podczerwień - Prawdziwy kurs - kąt pomiędzy prawdziwą linią południka N a linią kursu.
IP - Prawdziwe łożysko- kąt pomiędzy prawdziwą linią południka a linią namiaru.
d - Odchylenie- kąt między linią południka kompasu N k a linią południka magnetycznego N m.
d - Deklinacja- kąt między linią południka magnetycznego N m a linią południka prawdziwego N i.
Δ K - Korekta kompasu- kąt między linią prawdziwego południka N a linią południka kompasu N do.
PU - Kąt toru- kąt pomiędzy linią południka prawdziwego a linią zbieżną z kierunkiem kursu statku.
Prawdziwe wskazówki. Znając położenie południka prawdziwego (NS), dowolny kierunek na powierzchni ziemi (morza) można wyznaczyć na podstawie kąta pomiędzy północną częścią tego południka a kierunkiem w stronę obiektu. W tym przypadku wartość tego kąta mierzona jest w stopniach według układu kołowego, tj. od 0° do 360°.
Kierunek ruchy statków określona przez położenie jego płaszczyzny średnicy (DP). względem północnej części południka prawdziwego. Prawdziwy kurs statku (TC). Kąt między północną częścią prawdziwego południka a linią środkową statku nazywany jest prawdziwym kursem statku ( Ryż. 165).
Ryż. 165. Prawdziwe wskazówki
Prawdziwe łożysko(IP). Kąt między północną częścią południka prawdziwego a kierunkiem w stronę obserwowanego obiektu nazywa się namiarem prawdziwym ( Ryż. 165). W praktyce nawigator ma do czynienia z odwróconym namiarem rzeczywistym (RTB). OIP = IP ± 180°.
Kąt kierunku.(KU). Kąt pomiędzy płaszczyzną środkową statku a kierunkiem w stronę obserwowanego obiektu nazywany jest kątem kursu ( Ryż. 165). Kąt kursu c odczytuje się w zakresie od 0° do 180° i nazywa się go: lewą stroną (l/b) lub prawą stroną (r/b), w zależności od położenia obiektu względem DP. W przypadku, gdy KU = 90°, tj. kierunek w stronę obiektu jest prostopadły do DP, wówczas ten CP nazywa się trawersem (┴).
Aby obliczyć kierunki prawdziwe, stosuje się następujące wzory:
IP = IR + KU
KU = IP - IR
IR = IP - KU
W tym przypadku KU p/b ma znak „+”, a KU l/b ma znak „-”. Ze względu na to, że Ziemia jest ogromnym magnesem o biegunach NM i SM, siły magnetyzmu umieszczają igłę kompasu w płaszczyźnie południka magnetycznego. Strzałka ta skierowana jest z jednego końca na biegun północny, a drugi na południe. Zatem południk magnetyczny przechodzący przez oś igły magnetycznej nie pokrywa się z południkiem prawdziwym i tworzy z nim pewien kąt, który nazywa się deklinacją magnetyczną ( Ryż. 166).
Ryc. 166. Deklinacja magnetyczna
Deklinacja magnetyczna(d) - kąt pomiędzy północnymi częściami południka prawdziwego i magnetycznego. Jeśli d jest skierowane na wschód, to nazywa się je rdzeniem (E) i ma znak „+”, jeśli na zachód jest skierowane na wschód (W) i ma znak.Deklinacja magnetyczna ma różne wartości dla różnych miejscach na powierzchni ziemi, a dodatkowo wartość ta ma charakter zmienny. Dla danego obszaru nawigacyjnego podane są konkretne wartości d i jego roczna zmiana na mapie nawigacyjnej. Biorąc pod uwagę, że mapy są publikowane okresowo, nawigator musi wziąć pod uwagę zmianę deklinacji na przestrzeni lat, jakie upłynęły od roku opublikowania mapy do chwili obecnej. Przykładowo mapa wskazuje, że deklinacja magnetyczna (d 0) przypisana jest do roku 1990 i w tym obszarze jej wartość wynosi 2°.5E, spadek roczny wynosi D d = 0°.1. Pływanie odbyło się w 2000 roku. Należy dostosować deklinację do roku rejsu.
gdzie d jest deklinacją znormalizowaną do roku żeglugi;
n to liczba lat (różnica między rokiem rejsu a rokiem, do którego podana jest deklinacja na mapie);
∆d to roczna zmiana deklinacji (oznaczona znakiem „+” w przypadku wzrostu, znakiem w przypadku spadku).
Notatka: znak „+” jest umieszczony przed n, jeśli d jest wschodnie, i „-”, jeśli d jest zachodnie.
d 2000 = 2°,5 + 10(-0°,1) = + 1°,5
Odpowiedź: d 2000 = 1°,5E.
Inny przykład.
Znając wielkość deklinacji magnetycznej, łatwo jest obliczyć kierunki magnetyczne ze znanymi kierunkami rzeczywistymi:
MK = IR-d,
MP = IP-d
Wzory te są algebraiczne, dlatego przy obliczaniu należy wziąć pod uwagę znak deklinacji.
Przykłady.
Rozwiązanie(Ryż. 167): MK=45°,0-(-5 °,0)=50 °,0; MP=90 °,0-(-5 °,0)=95 °,0; KU=IP-IK=MP-MK=90 °,0-45 °,0=95 °,0-50°,0=+45 °,0=45° p/b
Odpowiedzi: MK = 50 °,0; MP=95°,0; KU=45 °p/b
Oprócz ziemskiego magnetyzmu na igle magnetycznej kompas działa żelazo okrętowe, które ma właściwość magnesowania z Ziemi. Pod tym względem igła kompasu pod wpływem żelaza statku odchyla się od płaszczyzny południka magnetycznego, a kierunek, w którym znajduje się oś igły na statku, nazywany jest południkiem kompasu. Odchylenie igły kompasu na statku od południka magnetycznego nazywa się odchyleniem.
Odchylenie(δ) - kąt między północnymi częściami południków magnetycznych i kompasowych ( Ryż. 169).
Ryc. 169. Odchylenie
Kiedy N K odchyla się na wschód od N M odchylenie ma znak „+”, a gdy N K odchyla się na zachód od Nm, odchylenie jest oznaczone znakiem „-”. Wielkość odchylenia zależy od kurs statku, a raczej od jego położenia względem linii sił magnetycznych Ziemi i jest wartością zmienną. Jeżeli wartość kompasu kierunkowego na statku przekracza wartość 8, podejmowane są działania mające na celu jego zniszczenie. Niszczenie odchyleń przeprowadzają specjaliści za pomocą magnesów i miękkiej stali umieszczonych w pobliżu kompasu magnetycznego. Nie da się jednak całkowicie zniszczyć odchyleń. Dlatego odchylenie resztkowe określa się na różnych kursach i wprowadza do tabeli. Istnieje wystarczająca liczba sposobów określenia odchylenia szczątkowego, ale wszystkie opierają się na fakcie, że konieczne jest ustalenie różnicy między znanymi namiarami magnetycznymi i kompasowymi na latarnię morską, cel, znak itp.
δ = MP – KP = OMP – OKP;
δ = IP – CP – re
Aby określić odchylenie szczątkowe w pobliżu portów, istnieją specjalnie wyposażone stanowiska testowe, które mają kilka ustawień (wentylatorów) ze znanymi łożyskami magnetycznymi. Przekraczanie linii w punktach głównych i ćwiartkowych (8 tras), kompas pobierane są namiar kompasu (CP). Następnie, korzystając ze znanego wzoru, oblicza się wartości δ na tych kursach. Jeżeli nie ma wachlarza ustawień, wówczas odchylenie można określić na podstawie jednego ustawienia, którego kierunek magnetyczny jest albo znany, albo obliczony na podstawie znanej deklinacji magnetycznej (d) i prawdziwego kierunku (TI) ustawienia. Zasada ustalania jest taka sama jak w poprzednim przypadku.
Do określenia odchylenia dopuszczalna jest także następująca metoda:
Odległy obiekt jest pobierany w odległości co najmniej 300 promieni cyrkulacji; statek (łódź) na kotwicy zawraca i zabiera 8 CP co 45°; średni CP () jest przyjmowany jako MP; różnica pomiędzy obliczonym MP a CP uzyskanym w 8 kursach będzie wynosić 8 w każdym kursie. Nawigator wyznaczając odchylenie musi pamiętać, że w przypadku zmiany kursu mapa nie dociera od razu do południka, dlatego poszukiwania kierunku po zmianie kursu należy dokonać po 3-5 minutach. Aby uzyskać wartość odchylenia w dowolnym obszarze żeglarskim, możesz użyć łodzi drewnianej lub gumowej. Pobrane z łodzi wykonanej z materiału niemagnetycznego łożyska na różnych pozycjach będą odpowiadać MP, a łożyska na tych samych obiektach będą odpowiadać łódź motorowa, łodzie, jachty z tego samego punktu dadzą stanowisko dowodzenia. Korzystając ze znanego już wzoru, określa się wartości 8, które przedstawiono w formie tabelarycznej.
Tabela odchyleń kompasu magnetycznego
Najpierw do tabeli wprowadza się obliczone wartości 8 w 8 kierunkach (N, NE, E, SE, S, SW, W, NW), a następnie wyznacza się jego wartości dla pozostałych przebiegów za pomocą interpolacji liniowej . Często tabela jest tworzona dla kontroli jakości co 10°, ale dla małe statki wystarczy skompilować większy stół w odstępach co 15°. W przypadku stosowania danych tabelarycznych dla QC niewymienionych w tabeli wartości 8 oblicza się za pomocą interpolacji. Na przykład należy zdefiniować wartość 8 dla CC 25°. Z tabeli dla CC 15° δ = + 0°,5, dla CC 30° δ = + 0°,8, tj. przy 15°(30° - 15°) Δδ = + 0°,3 (0°,8 - 0°,5). Zatem na 1° zmianę CC w tym przypadku przypada 0,02° (0°,3:15), a na 5° - 0°,1, na 10° - 0°,2. Oznacza to, że dla CC = 25° wartość δ będzie wynosić 0°,7 (0°,5 + 0°,2; 0°,8 - 0°,1). Podczas eksploatacji statku należy jak najczęściej określać odchylenie kompasu.
Korekta kompasu. Algebraiczna suma deklinacji i odchylenia magnetycznego nazywana jest korektą kompasu. (DK).
Innymi słowy, korekta kompasu magnetycznego to kąt pomiędzy północną częścią południka prawdziwego i kompasu ( Ryż. 170).
Ryż. 170. Korekta kompasu.a
Korekta i tłumaczenie rumbów. Przejście z kierunków kompasu na prawdziwe nazywa się korektą loksodromów, a przejście z kierunków kompasu na prawdziwe nazywa się translacją loksodromów.
W przypadkach, gdy znane są d i d, rozwiązanie problemów poprawiania i tłumaczenia rumbów nie jest trudne.
Przykłady.
№ 1 . Dany:
CC = 45°
d = 10°,
0E 8 = - 2°.0
IR =?
Rozwiązanie: (Ryż. 171)
Δ K = d + 8
Δ K = +10°,0 + (-2°,0) = +8°,0
Δ K = KK + DK = 45°.0 + 8°.0 = 53°.0
Ryc. 171.
Nr 2. Dany:
IP = 125°.0
d = 15°,0W
8 = - 5°.0
KP =?
Rozwiązanie: ( Ryż. 172)
Δ K = d + 8 = -15°.0 + (-5°.0) = - 20°.0
Δ P = IP - DC = 125°.0 - (-20°) = 145°.0
Odpowiedź:Δ K = 53°,0
Odpowiedź: Δ П = 145°.0
Ryż. 172.
Aby rozwiązać problemy za pomocą metody graficznej, zaleca się użycie Ryż. 173 oraz aby skorygować punkty kompasu i przetłumaczyć prawdziwe kierunki, poniższe diagramy:
|
Nazwy kierunków |
Procedura ustalania |
||
|
Słynny |
|||
|
Usunięty z kompasu podczas wyznaczania kierunku |
|||
|
Z tabeli odchyleń |
|||
|
Obliczane przy użyciu wzoru algebraicznego DK = d + δ |
|||
|
Obliczane ze wzoru IR = KK + ΔK |
|||
|
Obliczane ze wzoru KP = OKP ± 180° |
|||
|
Obliczane ze wzoru IP = KP + ΔK |
|||
|
FORMUŁY (algebraiczne) |
IR = MK + d; IP = MP + d; |
||
|
Usunięto z karty |
|||
|
Usunięto z karty |
|||
|
Usunięto z mapy i sprowadzono do roku rejsu (d = d0 ± n Δd) |
|||
|
Obliczane ze wzoru MK = IR - d |
|||
|
Obliczane ze wzoru MP = IP - d |
|||
|
Z tabeli odchyleń dla MK |
|||
|
DK = d + δ |
|||
|
Według wzoru KK = IR - DK |
|||
|
Według wzoru KK = IR - DK |
|||
|
FORMUŁY (algebraiczne |
KK = MK - δ; KP = MP - 8; |
||
 Jak ułożyć kanały wentylacyjne w domu prywatnym: zasady projektowania i wytyczne budowlane
Jak ułożyć kanały wentylacyjne w domu prywatnym: zasady projektowania i wytyczne budowlane Co to jest cegła cokołowa i jak się ją stosuje?
Co to jest cegła cokołowa i jak się ją stosuje? Również lub to samo – co jest poprawne?
Również lub to samo – co jest poprawne?