Šta je kurs i položaj? Određivanje pravaca na moru. Konvencije koje se koriste u zadacima navigacije
Osnova za određivanje pravca kretanja plovila i objekata koji okružuju plovilo su glavni pravci: S, S, E, W. Bilo koji od ovih glavnih pravaca može se uzeti kao početak brojanja pravaca. U navigaciji se tradicionalno kao početak izračunavanja pravaca uzima ili sjeverni ili južni dio linije pravog meridijana (podnevna linija). Smjerovi u odnosu na podnevnu liniju određuju se korištenjem različitih sistema brojanja ovisno o prirodi navigacijskih problema koji se rješavaju s tačnošću do 0,1 ′ .
Za određivanje smjera u ravnini pravi horizont Koriste se tri sistema podjele horizonta: kružni, polukružni i četvrti.
Round-robin sistem za brojanje pravaca
U kružnom sistemu kao početak izračunavanja pravaca uzima se sjeverni (sjeverni) dio prave meridijanske linije. U ovom sistemu, cela ravan pravog horizonta je podeljena na 360°. Smjerovi se broje od sjevernog dijela pravog meridijana u smjeru kazaljke na satu od 0° do 360°. Sistem ne daje negativne vrijednosti.Oblik snimanja: 37,4°.
U navigaciji je kružni sistem brojanja pravaca glavni i koristi se za određivanje pravca kretanja broda, kao i pravaca ka objektima vidljivim sa broda.
U skladu sa ovim sistemom, skale svih pokazivača kursa i instrumenata koji se koriste za određivanje pravaca na moru su podijeljene na brodove.
Kružni sistem za brojanje pravaca je jednostavniji i vizuelniji od ostalih, ali navigator mora biti u stanju da prevede pravce koje daje jedan sistem u pravce drugog sistema, jer se pri rešavanju mnogih navigacionih i astronomskih problema dobijaju rezultati koji ukazuju na naziv kvartal.
Polukružni sistem brojanja u pravcu
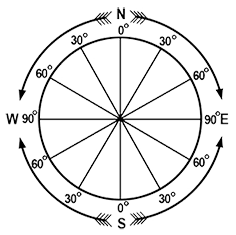
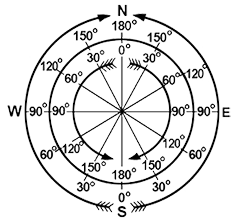 U polukružnom sistemu, prava ravnina horizonta je podeljena linijom NS na dva dela od po 180°. I sjeverni (N) dio i južni (S) dio prave meridijanske linije uzimaju se kao polazna tačka za smjerove brojanja (0°). U svim slučajevima, brojanje se vrši na osovinu (E) ili zapad (W) od 0° do 180°.
U polukružnom sistemu, prava ravnina horizonta je podeljena linijom NS na dva dela od po 180°. I sjeverni (N) dio i južni (S) dio prave meridijanske linije uzimaju se kao polazna tačka za smjerove brojanja (0°). U svim slučajevima, brojanje se vrši na osovinu (E) ili zapad (W) od 0° do 180°. Da bi se izbjegle nejasnoće, smjerovima u polukružnom sistemu brojanja daju se imena:
Prvo, slova N ili S označavaju onaj dio pravog meridijana od kojeg se smjer mjeri;
- tada brojevi pokazuju vrijednost ugla u stepenima;
- na kraju zapisa slovo E ili W označava smjer u kojem se vrši brojanje.
Učinite to dodavanjem ili oduzimanjem magnetske varijacije pravim smjerovima. U stvarnom svijetu avijacije život je malo složeniji. Površinski vjetrovi se izvještavaju na osnovu magnetskog sjevera, a vjetrovi u zraku na osnovu pravog sjevera. Ali budući da piloti simulatora letenja prvenstveno dobijaju informacije o magnetnim kursevima kada planiraju let, magnetni sever za vazdušne vetrove je olakšao naše proračune eliminacijom jednog faktora konverzije.
Ovo je bio veliki napredak za aviokompanije i omogućio im je da kreiraju rasporede bez obzira na vremenske prilike. Kako je sve počelo, pročitajte u sljedećem dijelu. Naučite o ranom razvoju navigacijskih pomagala. Pioneer će imati novo značenje. Trebamo li zadržati, reformisati, ukloniti, zamijeniti filozofske kurseve u školi? Glavni urednik, Beatrice Delvaux, zamolila me da budem “crvena nit” večeri.
Na primjer: N65°E, S135°W.
Sistem brojanja četvrtine smjera
 U kvartarnom sistemu, ravan pravog horizonta je linijama NS i EW podeljena na četiri četvrti: NE, SE, SW i NW.
U kvartarnom sistemu, ravan pravog horizonta je linijama NS i EW podeljena na četiri četvrti: NE, SE, SW i NW. Sjeverni (N) ili južni (S) dio pravog meridijana uzima se kao polazna tačka za smjerove brojanja (0°). Brojanje se vrši od S ili S prema E ili W od 0° do 90° u svakoj četvrtini:
U sjeveroistočnim četvrtima od S do E (u smjeru kazaljke na satu) od 0° do 90°;
- u JI četvrti od S do E (u smjeru suprotnom od kazaljke na satu) od 0° do 90°;
- u SW četvrti od J do W (kazaljke na satu) od 0° do 90°;
- u SZ kvartalu od S do W (u smjeru suprotnom od kazaljke na satu) od 0° do 90°.
Šta vas je pogodilo u našoj debati? Prvo me je pogodilo pitanje takozvanih kurseva „filozofije“ jer oni razdvajaju studente. Još jedna velika kritika ovih kurseva je njihova dosljednost. Dakle, kada govorimo o državljanstvu, da li zaista govorimo o zakonu? Bilo koji od njih je potpuno otvoren, potpuno pluralistički i može pasti u relativizam; ili prskamo - malo drzavljamo, malo ljudska prava, malo vjere itd. - i u tom slučaju kurs postaje nedosledan i nezanimljiv.
Ukratko, vidimo da ne znamo dobro na kojoj nozi da plešemo. Kritika je izrečena - a nastavnike niko ne ispituje: nije to poenta, ali ne znamo tačno šta želimo da postavimo kao ciljeve za nove kurseve. Zar ne očekujemo previše ovih novih kurseva?
Da biste izbjegli dvosmislenost, prilikom pisanja uputa za četvrtinu navedite naziv četvrti u kojoj se ovaj smjer nalazi.
 Na primjer: NE70.1°; SW38.3°; NW76.9°; SE70.0°.
Na primjer: NE70.1°; SW38.3°; NW76.9°; SE70.0°.
U praksi, ako su dati pravci naznačeni u različitim sistemima brojanja, onda se prvo konvertuju u bilo koji sistem. U ovom slučaju se koriste različite sheme ponovnog izračuna smjera, od kojih je jedna prikazana na slici.
PRAVI KURS I LEŽAJI. HEADING ANGLE.
 Da bi se osigurala sigurnost plovila na moru, potrebno je znati odrediti smjer njegovog kretanja u odnosu na zadatu putanju, kao i smjerove ka opasnostima plovidbe i orijentirima vidljivim s plovila.
Da bi se osigurala sigurnost plovila na moru, potrebno je znati odrediti smjer njegovog kretanja u odnosu na zadatu putanju, kao i smjerove ka opasnostima plovidbe i orijentirima vidljivim s plovila. Smjerovi na moru se određuju u odnosu na Pravi meridijan je meridijan koji prolazi kroz lokaciju promatrača" style="cursor: help; font-weight:800; font-style:italic; boja:#2e44b7; text-decoration:none"> pravi meridijan(N i) i se pozivaju pravim pravcima. Poznavajući položaj pravog meridijana, svaki smjer na površini zemlje (mora) može se odrediti uglom između sjevernog dijela ovog meridijana i smjera prema objektu. U ovom slučaju, vrijednost ovog ugla se mjeri u stepenima prema kružnom sistemu, tj. od 0° do 360°.
Smjer kretanja plovila određen je pravim kursom.
pravi kurs(IR) je horizontalni ugao između sjevernog dijela pravog meridijana i Promjerna ravan je vertikalna uzdužna ravan simetrije trupa broda" style="cursor: help; font-weight:800; font-style:italic; boja:#2e44b7; text-decoration:none"> središnja ravan plovila u smjeru njegovog kretanja, mjereno u smjeru kazaljke na satu.
Prečnik ravni koja se siječe sa ravninom Pravi horizont je horizontalna ravan. prolaz kroz oko posmatrača" style="cursor: pomoć; font-weight:800; font-style:italic; boja:#2e44b7; text-decoration:none">pravi horizont, formira liniju kursa broda. Dakle, pravi IR kurs je ugao između sjevernog dijela pravog meridijana i linije kursa. Pravi kurs se izračunava u sistemu kružnog brojanja.
Zove se pravac od tačke posmatranja do objekta linija ležaja.
Pravac od broda prema prirodnim i umjetnim objektima određuje se pravim smjerom.
Pravo držanje(IP) je horizontalni ugao između sjevernog dijela pravog meridijana i smjera od tačke posmatranja do objekta, mjeren u smjeru kazaljke na satu.
Vertikalna ravan koja prolazi kroz mesto posmatrača i mesto posmatranog objekta naziva se nišanski avion.
Formira se presek ravni posmatranja sa ravninom pravog horizonta noseća linija, što je pravac prema objektu. dakle, istinito držanje(IP) je ugao između sjevernog dijela pravog meridijana i linije smjera. Pravi kurs se izračunava u kružnom sistemu brojanja.
Prilikom rješavanja određenih problema koristi se smjer suprotan pravom smjeru. Ovaj pravac se zove obrnuti pravi ležaj(OIP):
OIP = IP + 180°, ako je IP OIP = IP - 180°, ako je IP > 180°.
OIP je ugao koji se mjeri u smjeru kazaljke na satu od sjevernog dijela pravog meridijana koji prolazi kroz orijentir do smjera od referentne tačke do broda.
Prilikom rješavanja problema za koje je to posebno važno međusobnog dogovora kurs broda i posmatranog objekta, mjera ugao kursa(KU) - horizontalni ugao između središnje ravni plovila i pravca prema posmatranom objektu, tj. ugao između pramca središnje linije broda i linije ležaja. Ugao kursa mjereno u kružnom ili polukružnom usmjerenom sistemu brojanja.
U osnovi, uglovi kursa se mjere u polukružnom sistemu i, kako bi se izbjegla dvosmislenost, daju im se imena koja ukazuju na koju stranu plovila (desnu ili lijevu) broje.
Na primjer: KU= 15° l/b, KU= 78° p/b.
Prilikom rješavanja problema uzimaju se u obzir uglovi smjera desne strane pozitivno, a uzimaju se u obzir smjerni uglovi lijeve strane negativan.
Prilikom rješavanja nekih problema potrebno je da se ugao smjera mjeri kružno. U ovom slučaju, brojanje se vrši od pramca središnje ravnine plovila udesno od 0° do 360°. Ugao smjera izmjeren u kružnom računu naziva se referentni ugao smjera(OKU).  Odnos između očitavanja ugla smjera i uglova smjera određen je izrazima:
Odnos između očitavanja ugla smjera i uglova smjera određen je izrazima:
OKU = CU p/b;
OKU = 360° - KU l/b
Nekim vrijednostima uglova kursa tradicionalno se dodeljuju nazivi. Na primjer, KU = 90° - smjer okomit na središnju ravninu broda - naziva se abeam.
Matematički odnos između pravih pravaca:
IP = IR + KU;
IR = IP - KU;
KU = IP - IR.
Prilikom izračunavanja pomoću ovih formula, trebali biste zapamtiti potrebu da se uzme u obzir predznak ugla smjera. Još jedna karakteristika je da pravi smjer i pravi smjer ne mogu imati negativne vrijednosti. Ako se, međutim, pri rješavanju problema dobije negativna vrijednost IC ili IP, onda je treba oduzeti od 360°, a dobiveni rezultat treba smatrati pozitivnim.
Diedarski ugao između sjevernog dijela ravni pravog meridijana i vertikalne ravni koja se poklapa sa linijom kretanja plovila naziva se ugao staze(PU).
PRIMJERI RJEŠAVANJA PROBLEMA
|
Primjer 1:
IR = 270°, Rješenje: IP=IR+KU=270°+130°= 400° Jer ispostavilo se da je rezultat veći od 360°, tada se 360° mora oduzeti od dobivenog rezultata: 400° - 360° = 40° Odgovor: IP = 40°. |
Primjer 2:
IR = 40°, Rješenje: Jer tada se uglovi s lijeve strane smatraju negativnim IP=IR+KU=40°+ (-70°)= -30° Jer Ako dobijete negativan rezultat, potrebno je da dobijenoj vrijednosti dodate 360°: –30° + 360° = 330° Odgovor: IP = 330°. |
Primjer 3:
IP = 340°, Rješenje: KU=IP-IR=340°- 40°=300°pr/b Jer Ako se pokaže da je vrijednost KU veća od 180°, tada je potrebno od dobivenog rezultata oduzeti 360°, a naziv KU (pr/b) promijeniti u suprotno (l/b). 360° - 300° = 60° l/b Odgovor: KU = 60° l/b. |
MAGNETNA DEKLINACIJA. MAGNETNI VODOVI I LEŽAJI.
Zemljini magnetski polovi nalaze se relativno blizu geografskih, ali se ne poklapaju s njima. Osim toga, oni postepeno mijenjaju svoj položaj.Vertikalna ravan koja prolazi kroz osu slobodno viseće magnetne igle, pod uticajem samo sila zemaljskog magnetizma, naziva se ravni magnetnog meridijana, a linija od presjeka ove ravni sa ravninom pravog horizonta je magnetni meridijan.
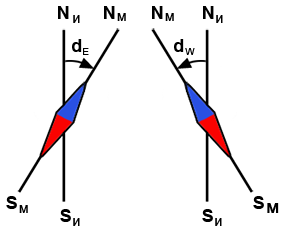 Horizontalni ugao za koji u datoj tački na Zemlji ravan magnetskog meridijana odstupa od ravni pravog meridijana naziva se magnetska deklinacija d. Mjeri se od sjevernog dijela pravog meridijana N i prema E ili W od 0 do 180°. Ako je sjeverni dio magnetskog meridijana N m odstupio od N i na istok, tada se deklinacija naziva E (istočna) i dodjeljuje joj se znak plus (+), ako je na zapadu, onda W (zapadna) sa znak minus (-).
Horizontalni ugao za koji u datoj tački na Zemlji ravan magnetskog meridijana odstupa od ravni pravog meridijana naziva se magnetska deklinacija d. Mjeri se od sjevernog dijela pravog meridijana N i prema E ili W od 0 do 180°. Ako je sjeverni dio magnetskog meridijana N m odstupio od N i na istok, tada se deklinacija naziva E (istočna) i dodjeljuje joj se znak plus (+), ako je na zapadu, onda W (zapadna) sa znak minus (-). Na pojedinim tačkama na Zemlji, magnetna deklinacija se razlikuje i po vrijednosti i po imenu. U većini plovnih područja deklinacija ne prelazi 25°E ili W. Izuzetak su visoke geografske širine, gdje deklinacija može doseći desetine stepeni, pa čak i 180° između istoimenog magnetskog i geografskog pola.
Da biste pravilno koristili magnetni kompas, morate znati magnetnu deklinaciju u vašem području plovidbe. U tu svrhu, vrijednost i naziv deklinacije su naznačeni na navigacijskim kartama. Međutim, zapažanjima je utvrđeno da vrijednost deklinacije ne ostaje konstantna čak ni na istom mjestu. U nekim područjima, deklinacija se može promijeniti i do 0,2-0,3° tokom godine. Dakle, navigacijske karte pokazuju i godinu kojoj je deklinacija dodijeljena i vrijednost njene godišnje promjene.
Iznos promjene magnetne deklinacije tokom jedne godine naziva se godišnja promjena magnetne deklinacije i u prosjeku se kreće od 0,0° do 0,2°.
U procesu bilo kakvog rada s navigacijskom kartom potrebno je prilagoditi magnetnu deklinaciju prema godini plovidbe. Da biste to učinili, vrijednosti magnetne deklinacije (s vlastitim predznakom) naznačene na karti, dodajte proizvod vrijednosti godišnje promjene (također s vlastitim predznakom) i broja godina koje su prošle od godine kojoj je deklinacija dodijeljena godini stvarnog putovanja, na primjer:
Mapa pokazuje:
Magnetna deklinacija 5,7°E, normalizirana na 2000. Godišnja promjena 0,1° do W.
Tada će za jedrenje u 2014. magnetna deklinacija biti:
d 2004 = + 5,7 + [(- 0,1 × (2014 - 2000)] = + 5,7 - 0,1 × 14 = 5,7 - 1,4 = 4,3°.
 Magnetski kurs(MK) je ugao u ravni pravog horizonta, mjeren od sjevernog dijela magnetnog meridijana u smjeru kazaljke na satu do pramca središnje ravni broda.
Magnetski kurs(MK) je ugao u ravni pravog horizonta, mjeren od sjevernog dijela magnetnog meridijana u smjeru kazaljke na satu do pramca središnje ravni broda. Magnetski ležaj(MP) je ugao u ravni pravog horizonta, mjeren od sjevernog dijela magnetnog meridijana u smjeru kazaljke na satu do smjera do orijentira.
Ugao koji se razlikuje od MP za 180° naziva se obrnuti magnetni ležaj(WMP): WMP = MP ± 180° ili MP = WMP ± 180°.
Magnetni kursevi i ležajevi mogu biti u rasponu od 0 do 360°.
Poznavajući magnetnu deklinaciju na datom mjestu na Zemlji, moguće je dobiti prave magnetne smjerove iz poznatih, a također i riješiti inverzni problem. Odnos između magnetskog i pravog smjera izražava se formulama:
IR = MK + d; IP = MP + d; OIP = OMP + d;
MK = IR - d; MP = IP - d; WMD = OIP - d.
ODSTUPANJE MAGNETSKOG KOMPASA. TEČAJI I LEŽAJI KOMPASA.
Linija preseka ravni pravog horizonta sa vertikalnom ravninom koja prolazi kroz osu magnetne igle, a koja je pod uticajem sile zemaljskog magnetizma i magnetnih sila brodskog gvožđa, naziva se meridijan kompasa.Set dijelovi i drugi čelični i željezni dijelovi posude koji se nalaze u magnetskom polju Zemlje postepeno se magnetiziraju i dobijaju svojstva magneta. Kao rezultat toga, u prostoru koji okružuje plovilo pojavljuje se vlastito magnetsko polje, čiji se učinak kombinira sa magnetskim poljem Zemlje. Magnetna igla brodskog kompasa postavljena je prema rezultantnim silama oba polja, zbog čega odstupa od smjera magnetskog meridijana.
 Horizontalni ugao za koji ravan meridijana kompasa odstupa od ravni magnetskog meridijana naziva se devijacija magnetnog kompasa d.
Horizontalni ugao za koji ravan meridijana kompasa odstupa od ravni magnetskog meridijana naziva se devijacija magnetnog kompasa d.Odstupanje se mjeri od sjevernog dijela magnetnog meridijana N m do E (sa znakom “+”) ili W (sa znakom “-”) od 0 do 180°.
Na svakom kursu, odstupanje brodskih kompasa je različito. To se objašnjava činjenicom da se prilikom promjene kursa mijenja položaj brodskog željeza u odnosu na igle magnetskog kompasa. Osim toga, nakon što se brod okrene, brodsko željezo se djelomično remagnetizira, što također dovodi do promjene u magnetnom polju broda.
 Smjer kompasa (CC) naziva se ugao u ravni pravog horizonta, mjeren od sjevernog dijela meridijana kompasa u smjeru kazaljke na satu do pramca središnje ravni broda.
Smjer kompasa (CC) naziva se ugao u ravni pravog horizonta, mjeren od sjevernog dijela meridijana kompasa u smjeru kazaljke na satu do pramca središnje ravni broda. Ležaj kompasa (CP) naziva se ugao u ravni pravog horizonta, meren od severnog dela meridijana kompasa u smeru kazaljke na satu do pravca ka orijentiru.
Ugao koji se razlikuje od CP za 180° naziva se obrnuti smjer kompasa OKP: OKP = KP ± 180° ili KP = OKP ± 180° Kompas kursevi i smjerovi mogu biti u rasponu od 0 do 360°.
Odnos kompasa i magnetnih pravaca:
MK = KK + d; MP = CP + d; OMP = OKP + d;
KK = MK - d; KP = MP - d; OKP = WMD - d.
Između CC, CP i CG orijentira tokom kružnog brojanja ostaje sljedeća veza:
KP = KK + KU;
KK = KP - KU;
KU = KP - KK.
KOREKCIJA MAGNETSKOG KOMPASA.
 Algebarski zbir devijacije i magnetne deklinacije, za koliko se pravci kompasa razlikuju od pravih, naziva se korekcija magnetnog kompasa:
Algebarski zbir devijacije i magnetne deklinacije, za koliko se pravci kompasa razlikuju od pravih, naziva se korekcija magnetnog kompasa: Δ K = d + d
Devijacija i deklinacija se uzimaju sa svojim znakovima, i to:
Ako se sjeverni kraj magnetske igle odstupi od pravog meridijana udesno (na istok), tada se deklinacija i devijacija nazivaju istočnim i smatraju se pozitivnim, tj. se zamjenjuju u formule sa znakom “+”.
Ako se sjeverni kraj magnetske igle odstupi od pravog meridijana ulijevo (na zapad), tada se deklinacija i devijacija nazivaju zapadnim i smatraju se negativnim, tj. se zamjenjuju u formule sa znakom "-".
Problemi povezani s prijelazom sa kurseva kompasa i smjera na prave se nazivaju korekcija rumba, i zadaci povezani s prijelazom sa pravih kurseva i smjerova preuzetih sa karte na one s kompasa - prijevod rumba.
Formule za ispravljanje rumbusa:
IR = KK + d + d ili IR = KK + Δ K
IP = KP + d + d ili IP = KP + Δ K
OIP = OKP + d + d ili OIP = OKP + Δ K
Formule za pretvaranje rumba:
KK = IR - d - d ili KK = IR - Δ K
KP = IP - d - d ili KP = IP - Δ K
OKP = OIP - d - d ili OKP = OIP - Δ K
Konvencije koje se koriste u zadacima navigacije
N i - Pravi meridijan- linija preseka vertikalne ravni koja prolazi kroz geografske polove Zemlje i mesta posmatrača sa površinom Zemlje.N m - Magnetni meridijan- linija presjeka ravnine pravog horizonta sa vertikalnom ravninom koja prolazi kroz osu slobodno viseće magnetne igle, koja je pod utjecajem samo sile zemaljskog magnetizma.
N do - meridijan kompasa- linija preseka ravni pravog horizonta sa vertikalnom ravninom koja prolazi kroz osu magnetne igle, koja je pod uticajem sile zemaljskog magnetizma i magnetnih sila brodskog gvožđa.
KK - Kurs za kompas- ugao između meridijanske linije kompasa Nk i linije kursa.
CP - Ležaj kompasa- ugao između meridijanske linije kompasa Nk i linije smera.
MK - Magnetni kurs- ugao između magnetnog meridijana N m i linije kursa.
MP - Magnetni ležaj- ugao između linije magnetnog meridijana N m i linije ležaja.
IR - True Course - ugao između prave meridijanske linije N i linije kursa.
IP - Pravi ležaj- ugao između prave meridijanske linije i noseće linije.
d - Odstupanje- ugao između meridijanske linije kompasa N k i linije magnetskog meridijana N m.
d - Deklinacija- ugao između linije magnetskog meridijana N m i linije pravog meridijana N i.
Δ K - Korekcija kompasa- ugao između linije pravog meridijana N i i linije meridijana kompasa N do.
PU - Ugao staze- ugao između linije pravog meridijana i linije koja se poklapa sa smjerom kursa broda.
Prava uputstva. Poznavajući položaj pravog meridijana (NS), bilo koji smjer na površini zemlje (mora) može se odrediti uglom između sjevernog dijela ovog meridijana i smjera prema objektu. U ovom slučaju, vrijednost ovog ugla se mjeri u stepenima prema kružnom sistemu, tj. od 0° do 360°.
Smjer kretanja broda određen položajem njegove dijametralne ravni (DP). u odnosu na sjeverni dio pravog meridijana. Pravi kurs plovila (TC). Ugao između sjevernog dijela pravog meridijana i središnje linije broda naziva se pravi tok broda ( pirinač. 165).
Rice. 165. Prava uputstva
Pravo držanje(IP). Ugao između sjevernog dijela pravog meridijana i smjera prema promatranom objektu naziva se pravi smjer ( pirinač. 165). U praksi, navigator se mora nositi sa obrnutim pravim smjerom (RTB). OIP = IP ± 180°.
Ugao kursa.(KU). Ugao između središnje ravnine plovila i smjera prema objektu koji se promatra naziva se ugao smjera ( pirinač. 165). Ugao smjera c očitava se od 0° do 180° i naziva se: lijeva strana (l/b) ili desna strana (r/b), ovisno o lokaciji objekta u odnosu na DP. U slučaju kada je KU = 90°, tj. smjer prema objektu je okomit na DP, tada se ovaj CP naziva pomak (┴).
Za izračunavanje pravih smjerova koriste se sljedeće formule:
IP = IR + KU
KU = IP - IR
IR = IP - KU
U ovom slučaju KU p/b ima znak “+”, a KU l/b znak “-”. Zbog činjenice da je Zemlja ogroman magnet sa polovima NM i SM, sile magnetizma postavljaju iglu kompasa u ravan magnetnog meridijana. Ova strelica je jednim krajem usmjerena prema sjevernom polu, a drugim prema jugu. Dakle, magnetni meridijan koji prolazi kroz osu magnetne igle ne poklapa se sa pravim meridijanom i čini s njim određeni ugao, koji se naziva magnetna deklinacija ( pirinač. 166).
Fig. 166. Magnetna deklinacija
Magnetna deklinacija(d) - ugao između severnih delova pravog i magnetnog meridijana. Ako je d usmjeren prema istoku, onda se naziva jezgro (E) i ima znak "+", ako je prema zapadu usmjeren na istok (W) i ima predznak. Magnetna deklinacija ima različite vrijednosti za različita mjesta na zemljinoj površini i, osim toga, ova vrijednost je promjenljive prirode. Konkretne vrijednosti d i njegova godišnja promjena date su za dato područje plovidbe na navigacijskoj karti. S obzirom da se karte objavljuju periodično, navigator mora uzeti u obzir promjenu deklinacije tokom godina koje su prošle od godine kada je mapa objavljena do danas. Na primjer, karta pokazuje da je magnetna deklinacija (d 0) data za 1990. godinu iu ovoj oblasti njena vrijednost je 2°.5E, godišnji pad je D d = 0°.1. Plivanje je održano 2000. Potrebno je prilagoditi deklinaciju prema godini putovanja.
gdje je d deklinacija normalizirana na godinu plovidbe;
n je broj godina (razlika između godine putovanja i godine kojoj je deklinacija data na karti);
∆d je godišnja promjena deklinacije (ima znak “+” ako postoji povećanje, znak ako postoji pad).
Bilješka: znak "+" se stavlja ispred n ako je d istočni i "-" ako je d zapadni.
d 2000 = 2°,5 + 10(-0°,1) = + 1°,5
Odgovori: d 2000 = 1°.5E.
Još jedan primjer.
Poznavajući veličinu magnetske deklinacije, lako je izračunati magnetne smjerove s poznatim pravim smjerovima:
MK = IR-d,
MP = IP-d
Ove formule su algebarske, tako da prilikom izračunavanja morate uzeti u obzir predznak deklinacije.
Primjeri.
Rješenje(pirinač. 167): MK=45° ,0-(-5 °,0)=50 °,0; MP=90 °,0-(-5 °,0)=95 °,0; KU=IP-IK=MP-MK=90 °,0-45 °,0=95 °,0-50°,0=+45 °,0=45° p/b
Odgovori: MK = 50 °,0; MP=95°,0; KU=45 °p/b
Pored zemaljskog magnetizma na magnetnoj igli kompas brodsko željezo, koje ima svojstvo magnetiziranja sa Zemlje, djeluje. S tim u vezi, igla kompasa, pod uticajem brodskog gvožđa, odstupa od ravni magnetnog meridijana i pravac u kome se nalazi osa igle na brodu naziva se meridijan kompasa. Odstupanje igle kompasa na brodu od magnetskog meridijana naziva se devijacija.
Devijacija(δ) - ugao između sjevernih dijelova magnetskog i kompasnog meridijana ( pirinač. 169).
Fig. 169. Devijacija
Kada N K odstupi istočno od N M odstupanje ima znak "+"; kada N K odstupi zapadno od Nm, odstupanje ima znak "-". Količina odstupanja zavisi od kurs broda, odnosno na njegovom položaju u odnosu na Zemljine magnetske linije sile, i promjenjiva je vrijednost. Ako vrijednost 8 smjernog kompasa na brodu premašuje, poduzimaju se mjere za njegovo uništenje. Uništavanje devijacije provode stručnjaci pomoću magneta i mekog čelika postavljenih blizu magnetnog kompasa. Međutim, nemoguće je potpuno uništiti devijaciju. Stoga se rezidualna devijacija utvrđuje na različitim kursevima i unosi u tabelu. Postoji dovoljan broj načina za određivanje zaostalog odstupanja, ali svi se zasnivaju na činjenici da je potrebno utvrditi razliku između poznatih magnetnih i kompasnih smjerova prema svjetioniku, meti, znaku itd.
δ = MP - KP = OMP - OKP;
δ = IP - CP - d
Za određivanje zaostalog odstupanja u blizini priključaka, postoje posebno opremljene poligone koje imaju nekoliko (ventilatorskih) poravnanja sa poznatim magnetnim ležajevima. Prelazak linija na glavnim i četvrtinskim tačkama (8 staza), kompas uzimaju se smjerovi kompasa (CP). Zatim se, koristeći dobro poznatu formulu, izračunavaju vrijednosti δ na ovim kursevima. Ako ne postoji lepeza poravnanja, onda se odstupanje može odrediti iz jednog poravnanja, čiji je magnetni smjer ili poznat ili izračunat iz poznate magnetske deklinacije (d) i pravog smjera (TI) poravnanja. Princip utvrđivanja je isti kao u prethodnom slučaju.
Sljedeća metoda je također prihvatljiva za određivanje odstupanja:
Udaljeni objekt se uzima na udaljenosti od najmanje 300 radijusa cirkulacije; plovilo (čamac) na sidru se okreće i uzima 8 CP svakih 45°; prosječni CP () se uzima kao MP; razlika između izračunatog MP i CP uzetih u 8 kurseva će pokazati vrijednost 8 u svakom kursu. Prilikom utvrđivanja devijacije, navigator mora imati na umu da kada se kurs promijeni, karta ne stiže odmah na meridijan, tako da određivanje smjera nakon promjene kursa treba obaviti nakon 3-5 minuta. Da biste dobili vrijednost odstupanja u bilo kojem području plovidbe, možete koristiti drveni ili gumeni čamac. Uzeti s čamca napravljenog od nemagnetnog materijala, smjerovi na različitim smjerovima će odgovarati MP, a smjerovi na istim objektima će odgovarati motorni čamac, čamci, jahte sa istog mjesta dat će komandno mjesto. Koristeći već poznatu formulu, određuju se vrijednosti 8 koje su prikazane u obliku tabele.
Tablica odstupanja magnetnog kompasa
Prvo se u tabelu unose izračunate vrijednosti od 8 u 8 smjerova (N, NE, E, SE, S, SW, W, NW), a zatim se linearnom interpolacijom određuju njegove vrijednosti za preostale kurseve . Često se sastavlja tabela za QC svakih 10°, ali za mala plovila dovoljno je sastaviti veću tabelu u intervalima od 15°. Kada se koriste tabelarni podaci za QC koji nisu navedeni u tabeli, vrijednosti 8 se izračunavaju interpolacijom. Na primjer, trebate definirati vrijednost 8 za CC 25°. Iz tabele za CC 15° δ = + 0°,5, za CC 30° δ = + 0°,8, tj. na 15°(30° - 15°) Δδ = + 0°,3 (0°,8 - 0°,5). Dakle, za 1° promjenu CC u ovom slučaju dolazi 0,02° (0°,3:15), a za 5° - 0°,1, za 10° - 0°,2. To znači da će za CC = 25° vrijednost δ biti 0°,7 (0°,5 + 0°,2; 0°,8 - 0°,1). Tokom rada plovila, odstupanje kompasa treba odrediti što je češće moguće.
Korekcija kompasa. Algebarski zbir magnetne deklinacije i devijacije naziva se kompasna korekcija. (DK).
Drugim riječima, korekcija magnetskog kompasa je ugao između sjevernog dijela pravog i kompasnog meridijana ( pirinač. 170).
Rice. 170. Korekcija kompasa.a
Ispravka i prijevod rumova. Prelaz sa pravca kompasa na prave naziva se korekcija rumba, a prelazak sa pravih na pravac kompasa prevođenjem rumba.
U slučajevima kada su d i d poznati, rješavanje problema ispravljanja i prevođenja rumbova nije teško.
Primjeri.
№ 1 . Dato:
CC = 45°
d = 10°,
0E 8 = - 2°.0
IR = ?
Rješenje: (pirinač. 171)
Δ K = d + 8
Δ K = +10°,0 + (-2°;0) = +8°,0
Δ K = KK + DK = 45°,0 + 8°,0 = 53°,0
Fig. 171.
br. 2. Dato:
IP = 125°.0
d = 15°,0W
8 = - 5°.0
KP = ?
Rješenje: ( pirinač. 172)
Δ K = d + 8 = -15°,0 + (-5°,0) = - 20°,0
Δ P = IP - DC = 125°.0 - (-20°) = 145°.0
odgovor:Δ K = 53°.0
Odgovori: Δ P = 145°.0
Rice. 172.
Za rješavanje problema pomoću grafičke metode, preporučuje se korištenje pirinač. 173, i za ispravljanje točaka kompasa i prevođenje pravih smjerova, slijedeći dijagrami:
|
Nazivi pravaca |
Postupak utvrđivanja |
||
|
Famous |
|||
|
Uklonjeno sa kompasa prilikom traženja pravca |
|||
|
Iz tabele odstupanja |
|||
|
Izračunato pomoću algebarske formule DK = d + δ |
|||
|
Izračunava se pomoću formule IR = KK + ΔK |
|||
|
Izračunato pomoću formule KP = OKP ± 180° |
|||
|
Izračunava se pomoću formule IP = KP + ΔK |
|||
|
FORMULE (algebarske) |
IR = MK + d; IP = MP + d; |
||
|
Uklonjeno sa kartice |
|||
|
Uklonjeno sa kartice |
|||
|
Uklonjeno sa karte i svedeno na godinu putovanja (d = d0 ± n Δd) |
|||
|
Izračunato po formuli MK = IR - d |
|||
|
Izračunava se pomoću formule MP = IP - d |
|||
|
Iz tabele odstupanja za MK |
|||
|
DK = d + δ |
|||
|
Prema formuli KK = IR - DK |
|||
|
Prema formuli KK = IR - DK |
|||
|
FORMULE (algebarske |
KK = MK - δ; KP = MP - 8; |
||
 Rav, Rabbi, Rebbe - ko je on?
Rav, Rabbi, Rebbe - ko je on? Abelardova filozofija - konceptualizam
Abelardova filozofija - konceptualizam Veliki sedef ili veliki šumski sedef Kako izgleda leptir sedef?
Veliki sedef ili veliki šumski sedef Kako izgleda leptir sedef?