Ce este cursul și orientarea? Determinarea direcțiilor pe mare. Convenții utilizate în sarcinile de navigare
Baza pentru determinarea direcțiilor de mișcare a vasului și a obiectelor care înconjoară vasul sunt direcțiile principale: N, S, E, W. Oricare dintre aceste direcții principale poate fi luată drept începutul numărării direcției. În navigație, în mod tradițional, fie partea de nord, fie partea de sud a liniei adevăratului meridian (linia de amiază) este luată ca început al calculului direcțiilor. Direcțiile în raport cu linia de la amiază sunt determinate folosind diferite sisteme de numărare în funcție de natura problemelor de navigație rezolvate cu o precizie de până la 0,1 ′ .
Pentru a determina direcția în plan orizont adevărat Se folosesc trei sisteme de împărțire a orizontului: circular, semicircular și sfert.
Sistem rotund pentru numărarea direcțiilor
În sistemul circular, partea nordică (nordica) a adevăratei linii meridiane este luată ca început al calculului direcțiilor. În acest sistem, întregul plan al orizontului adevărat este împărțit în 360°. Direcțiile sunt numărate din partea de nord a meridianului adevărat în sensul acelor de ceasornic de la 0° la 360°. Sistemul nu furnizează valori negative.Forma de înregistrare: 37,4°.
În navigație, sistemul circular de numărare a direcțiilor este cel principal și este folosit pentru a determina direcția de mișcare a navei, precum și direcțiile către obiectele vizibile de pe navă.
În conformitate cu acest sistem, scalele tuturor indicatoarelor de curs și instrumentelor utilizate pentru a determina direcțiile pe mare sunt împărțite pe nave.
Sistemul circular de numărare a direcțiilor este mai simplu și mai vizual decât altele, dar navigatorul trebuie să fie capabil să traducă direcțiile date de un sistem în direcții de către un alt sistem, deoarece la rezolvarea multor probleme de navigație și astronomie se obțin rezultate indicând numele sfert.
Sistem de numărare a direcției semi-circulare
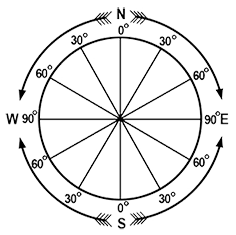
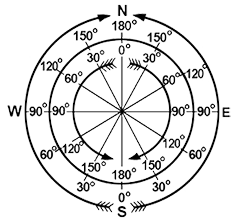 Într-un sistem semicircular, planul orizontului adevărat este împărțit de linia NS în două părți de 180° fiecare. Atât partea de nord (N) cât și partea de sud (S) a adevăratei linii meridiane sunt luate ca punct de plecare pentru numărarea direcțiilor (0°). În toate cazurile, numărarea se efectuează către axa (E) sau vest (W) de la 0° la 180°.
Într-un sistem semicircular, planul orizontului adevărat este împărțit de linia NS în două părți de 180° fiecare. Atât partea de nord (N) cât și partea de sud (S) a adevăratei linii meridiane sunt luate ca punct de plecare pentru numărarea direcțiilor (0°). În toate cazurile, numărarea se efectuează către axa (E) sau vest (W) de la 0° la 180°. Pentru a evita ambiguitatea, direcțiile din sistemul de numărare semicircular primesc nume:
În primul rând, literele N sau S indică acea parte a meridianului adevărat din care este măsurată direcția;
- atunci numerele arata valoarea unghiului in grade;
- la sfârşitul înregistrării, litera E sau W indică direcţia în care se face numărarea.
Faceți acest lucru adunând sau scăzând variația magnetică la direcțiile adevărate. În lumea reală a aviației, viața este puțin mai complicată. Vânturile de suprafață sunt raportate pe baza nordului magnetic, iar vânturile din aer sunt raportate pe baza nordului adevărat. Dar, deoarece piloții de simulare de zbor obțin în primul rând informații despre direcțiile magnetice atunci când planifică un zbor, nordul magnetic pentru vânturile aeropurtate a făcut calculele noastre mai ușoare eliminând un factor de conversie.
Aceasta a fost o descoperire majoră pentru companiile aeriene și le-a permis să creeze programe fără a ține cont de vreme. Citiți cum a început totul în secțiunea următoare. Aflați despre dezvoltarea timpurie a ajutoarelor de navigație. Pionier va avea un nou sens. Ar trebui să menținem, să reformăm, să înlăturăm, să înlocuim cursurile de filosofie din școală? Editor sef, Beatrice Delvaux, m-a rugat să fiu „firul roșu” al serii.
De exemplu: N65°E, S135°W.
Sistem de numărare a sfertului de direcție
 În sistemul de sferturi, planul orizontului adevărat este împărțit în patru sferturi de liniile NS și EW: NE, SE, SW și NV.
În sistemul de sferturi, planul orizontului adevărat este împărțit în patru sferturi de liniile NS și EW: NE, SE, SW și NV. Partea de nord (N) sau de sud (S) a meridianului adevărat este luată ca punct de plecare pentru numărarea direcțiilor (0°). Numărarea se efectuează de la N sau S spre E sau V de la 0° la 90° în fiecare trimestru:
În sferturi NE de la N la E (în sensul acelor de ceasornic) de la 0° la 90°;
- în sfertul SE de la S la E (în sens invers acelor de ceasornic) de la 0° la 90°;
- in sfertul SV de la S la V (sens acelor de ceasornic) de la 0° la 90°;
- în sfertul NV de la N la V (în sens invers acelor de ceasornic) de la 0° la 90°.
Ce te-a frapat la dezbaterea noastră? La început m-a lovit problema așa-ziselor cursuri de „filozofie” pentru că se segregează studenții. O altă critică majoră la adresa acestor cursuri este consistența lor. Deci, când vorbim despre cetățenie, vorbim cu adevărat de lege? Oricare dintre ei este complet deschis, complet pluralist și poate cădea în relativism; sau stropim - facem putina cetatenie, putina drepturile omului, putina religie etc. - și în acest caz cursul devine inconsecvent și neinteresant.
Pe scurt, vedem că nu știm prea bine pe ce picior să dansăm. Critica a fost făcută – și nimeni nu-i pune la îndoială pe profesori: nu asta e ideea, dar nu știm exact ce dorim să atribuim ca obiective pentru noile cursuri. Nu ne așteptăm la prea multe din aceste noi cursuri?
Pentru a evita ambiguitatea, atunci când scrieți direcții de sfert, indicați numele trimestrului în care se află această direcție.
 De exemplu: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
De exemplu: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
În practică, dacă direcțiile date sunt indicate în diferite sisteme de numărare, atunci acestea sunt mai întâi convertite în orice sistem. În acest caz, sunt utilizate diverse scheme de recalculare a direcției, dintre care una este prezentată în figură.
CURSURI ȘI RULMENȚI ADEVĂRATĂ. unghiul direcției.
 Pentru a asigura siguranța unei nave pe mare, este necesar să se poată determina direcția mișcării acesteia față de o cale dată, precum și direcțiile către pericolele de navigație și reperele vizibile de pe navă.
Pentru a asigura siguranța unei nave pe mare, este necesar să se poată determina direcția mișcării acesteia față de o cale dată, precum și direcțiile către pericolele de navigație și reperele vizibile de pe navă. Direcțiile pe mare sunt determinate în raport cu Adevăratul meridian este meridianul care trece prin locația observatorului" style="cursor: help; greutate font: 800; stil font: cursiv; culoare:#2e44b7; text-decoration:none"> adevărat meridian(N și) și sunt numite directii adevarate. Cunoscând poziția adevăratului meridian, orice direcție de pe suprafața pământului (mării) poate fi determinată de unghiul dintre partea de nord a acestui meridian și direcția către obiect. În acest caz, valoarea acestui unghi se măsoară în grade conform sistemului circular, adică. de la 0° la 360°.
Direcția de mișcare a navei este determinată de direcția adevărată.
curs adevărat(IR) este unghiul orizontal dintre partea de nord a meridianului adevărat și Planul diametral este planul longitudinal vertical de simetrie al carenei navei" style="cursor: help; greutate font: 800; stil font: cursiv; culoare:#2e44b7; text-decoration:none"> plan central a vasului în sensul deplasării acestuia, măsurat în sensul acelor de ceasornic.
Plan diametral care se intersectează cu planul Orizontul adevărat este un plan orizontal. trecerea prin ochiul observatorului" style="cursor: help; greutate font: 800; stil font: cursiv; culoare:#2e44b7; text-decoration:none">orizon adevărat, formează linia de curs a navei. Astfel, cursul IR adevărat este unghiul dintre partea de nord a meridianului adevărat și linia de curs. Cursul de schimb real este calculat într-un sistem de numărare circulară.
Se numește direcția de la punctul de observare la obiect linia de rulment.
Direcția de la navă către obiectele naturale și artificiale este determinată de direcția reală.
Purtarea adevărată(IP) este unghiul orizontal dintre partea de nord a meridianului adevărat și direcția de la punctul de observare la obiect, măsurat în sensul acelor de ceasornic.
Se numește planul vertical care trece prin locul observatorului și locul obiectului observat avion de ochire.
Se formează intersecția planului de vedere cu planul orizontului adevărat linie de rulment, care este direcția către obiect. Prin urmare, purtare adevărată(IP) este unghiul dintre partea de nord a meridianului adevărat și linia de orientare. Lagărul adevărat este calculat într-un sistem de numărare circulară.
La rezolvarea anumitor probleme se folosește direcția opusă rulmentului adevărat. Această direcție se numește rulment adevărat invers(OIP):
OIP = IP + 180°, dacă IP OIP = IP - 180°, dacă IP > 180°.
OIP este un unghi care se măsoară în sensul acelor de ceasornic de la partea de nord a meridianului adevărat care trece prin reper până la direcția de la un punct de referinţă la navă.
La rezolvarea problemelor pentru care are o importanță deosebită aranjament reciproc cursul navei și obiectul observat, măsura unghiul de îndreptare(KU) - unghiul orizontal dintre planul liniei centrale a navei și direcția către obiectul observat, adică. unghiul dintre prova liniei centrale a navei și linia de rezemare. Unghiul de îndreptare măsurată într-un sistem de numărare direcțional circular sau semicircular.
Practic, unghiurile de îndreptare sunt măsurate într-un sistem semicircular și, pentru a evita ambiguitatea, li se dau nume care indică ce parte a vasului (dreapta sau stânga) au fost numărate.
De exemplu: KU= 15° l/b, KU= 78° p/b.
La rezolvarea problemelor se iau în considerare unghiurile de îndreptare ale laturii tribord pozitiv, iar unghiurile de direcție din partea stângă sunt luate în considerare negativ.
La rezolvarea unor probleme, este necesar ca unghiul de direcție să fie măsurat într-un cont circular. În acest caz, numărarea se efectuează de la prova planului central al navei spre dreapta de la 0° la 360°. Unghiul de direcție măsurat într-un cont circular se numește referință unghiului de direcție(OKU).  Relația dintre citirea unghiului de direcție și unghiurile de direcție este determinată de expresiile:
Relația dintre citirea unghiului de direcție și unghiurile de direcție este determinată de expresiile:
OKU = CU p/b;
OKU = 360° - KU l/b
Unele valori ale unghiurilor de direcție sunt în mod tradițional atribuite nume. De exemplu, KU = 90° - direcția perpendiculară pe planul liniei centrale a navei - se numește razna.
Relația matematică între direcțiile adevărate:
IP = IR + KU;
IR = IP - KU;
KU = IP - IR.
Când calculați folosind aceste formule, ar trebui să vă amintiți că trebuie să luați în considerare semnul unghiului de direcție. O altă caracteristică este că direcția adevărată și direcția adevărată nu pot avea valori negative. Dacă totuși, la rezolvarea problemelor, se obține o valoare IC sau IP negativă, atunci aceasta trebuie scăzută de la 360°, iar rezultatul obținut trebuie considerat pozitiv.
Unghiul diedric dintre partea de nord a planului adevăratului meridian și planul vertical care coincide cu linia de mișcare a vasului se numește unghiul de urmărire(PU).
EXEMPLE DE REZOLVARE A PROBLEMELOR
|
Exemplul 1:
IR = 270°, Soluţie: IP=IR+KU=270°+130°= 400° Deoarece rezultatul s-a dovedit a fi mai mare de 360°, apoi 360° trebuie scăzut din rezultatul obținut: 400° - 360° = 40° Răspuns: IP = 40°. |
Exemplul 2:
IR = 40°, Soluţie: Deoarece unghiurile din partea stângă sunt considerate negative, atunci IP=IR+KU=40°+ (-70°)= -30° Deoarece Dacă obțineți un rezultat negativ, trebuie să adăugați 360° la valoarea obținută: –30° + 360° = 330° Răspuns: IP = 330°. |
Exemplul 3:
IP = 340°, Soluţie: KU=IP-IR=340°- 40°=300°pr/b Deoarece Dacă valoarea KU se dovedește a fi mai mare de 180 °, atunci este necesar să scădeți 360 ° din rezultatul obținut și să schimbați numele KU (pr/b) la opusul (l/b). 360° - 300° = 60° l/b Răspuns: KU = 60° l/b. |
DECLINAREA MAGNETICĂ. CURSURI ȘI RULMENȚI MAGNETICE.
Polii magnetici ai Pământului sunt situați relativ aproape de cei geografici, dar nu coincid cu aceștia. În plus, își schimbă treptat poziția.Un plan vertical care trece prin axa unui ac magnetic suspendat liber, sub influența numai a forțelor magnetismului pământesc, se numește planul meridianului magnetic, iar linia de la intersecția acestui plan cu planul orizontului adevărat este meridian magnetic.
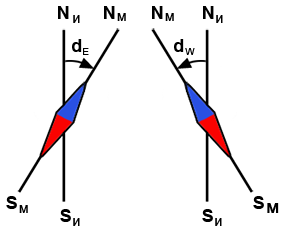 Unghiul orizontal cu care, într-un punct dat de pe Pământ, planul meridianului magnetic se abate de la planul meridianului adevărat se numește declinație magnetică d. Se măsoară din partea de nord a adevăratului meridian N și spre E sau V de la 0 la 180°. Dacă partea de nord a meridianului magnetic Nm este deviată de la N și la est, atunci declinația se numește E (est) și i se atribuie semnul plus (+), dacă la vest, atunci W (vest) cu un semnul minus (-).
Unghiul orizontal cu care, într-un punct dat de pe Pământ, planul meridianului magnetic se abate de la planul meridianului adevărat se numește declinație magnetică d. Se măsoară din partea de nord a adevăratului meridian N și spre E sau V de la 0 la 180°. Dacă partea de nord a meridianului magnetic Nm este deviată de la N și la est, atunci declinația se numește E (est) și i se atribuie semnul plus (+), dacă la vest, atunci W (vest) cu un semnul minus (-). În puncte individuale de pe Pământ, declinația magnetică diferă atât ca valoare, cât și ca nume. În majoritatea zonelor navigabile, declinația nu depășește 25°E sau V. Excepție fac latitudinile mari, unde declinarea poate ajunge la zeci de grade, și chiar 180° între polii magnetic și geografic cu același nume.
Pentru a utiliza corect o busolă magnetică, trebuie să cunoașteți declinația magnetică din zona dvs. de navigație. În acest scop, valoarea și denumirea declinației sunt indicate pe hărțile de navigație. Cu toate acestea, observațiile au stabilit că valoarea declinației nu rămâne constantă nici măcar în același loc. În unele zone, declinația se poate modifica până la 0,2-0,3° pe parcursul unui an. Prin urmare, hărțile de navigație indică, de asemenea, anul căruia îi este atribuită declinația și valoarea modificării sale anuale.
Se numește cantitatea de modificare a declinației magnetice pe parcursul unui an modificarea anuală a declinației magneticeși medii de la 0,0° la 0,2°.
În procesul oricărei lucrări cu o hartă de navigație, este necesar să se ajusteze declinația magnetică la anul de navigație. Pentru a face acest lucru, la valoarea declinației magnetice (cu semnul propriu) indicată pe hartă, se adaugă produsul dintre valoarea variației anuale (tot cu semnul său propriu) și numărul de ani care au trecut din anul. căruia îi este atribuită declinația anului călătoriei efective, de exemplu:
Harta indică:
Declinație magnetică 5,7°E, normalizată până în 2000. Modificare anuală 0,1° la V.
Apoi, pentru navigarea în 2014, declinația magnetică va fi:
d 2004 = + 5,7 + [(- 0,1 × (2014 - 2000)] = + 5,7 - 0,1 × 14 = 5,7 - 1,4 = 4,3°.
 Curs magnetic(MK) este unghiul în planul orizontului adevărat, măsurat de la partea de nord a meridianului magnetic în sensul acelor de ceasornic până la prova planului central al navei.
Curs magnetic(MK) este unghiul în planul orizontului adevărat, măsurat de la partea de nord a meridianului magnetic în sensul acelor de ceasornic până la prova planului central al navei. Rulment magnetic(MP) este unghiul în planul orizontului adevărat, măsurat de la partea de nord a meridianului magnetic în sensul acelor de ceasornic până la direcția reperului.
Se numește un unghi care diferă de MP cu 180° rulment magnetic invers(WMP): WMP = MP ± 180° sau MP = WMP ± 180°.
Cursurile și lagărele magnetice pot varia de la 0 la 360°.
Cunoscând declinația magnetică într-un loc dat de pe Pământ, este posibil să se obțină direcțiile magnetice adevărate din cele cunoscute și, de asemenea, să se rezolve problema inversă. Relația dintre direcțiile magnetice și adevărate este exprimată prin formulele:
IR = MK + d; IP = MP + d; OIP = OMP + d;
MK = IR - d; MP = IP - d; WMD = OIP - d.
DEVIEREA BUSOLEI MAGNETICE. CURSURI ȘI RUMMENȚI BUSOLEI.
Linia de intersecție a planului orizontului adevărat cu planul vertical care trece prin axa acului magnetic, care se află sub influența forței magnetismului pământului și a forțelor magnetice ale fierului navei, se numește meridianul busolei.Piesele de fixare și alte părți din oțel și fier ale vasului situate în câmpul magnetic al Pământului sunt magnetizate treptat și dobândesc proprietățile unui magnet. Ca urmare, propriul său câmp magnetic apare în spațiul din jurul navei, al cărui efect este combinat cu câmpul magnetic al Pământului. Acul magnetic al busolei unei nave este setat în funcție de forțele rezultate ale ambelor câmpuri, drept urmare se abate de la direcția meridianului magnetic.
 Unghiul orizontal cu care planul meridianului busolei se abate de la planul meridianului magnetic se numește abaterea busolei magnetice d.
Unghiul orizontal cu care planul meridianului busolei se abate de la planul meridianului magnetic se numește abaterea busolei magnetice d.Abaterea este măsurată de la partea de nord a meridianului magnetic Nm la E (cu semnul „+”) sau W (cu semnul „-”) de la 0 la 180°.
Pe fiecare cursă, abaterea busolei navei este diferită. Acest lucru se explică prin faptul că atunci când cursul se schimbă, poziția fierului navei în raport cu acele busolei magnetice se schimbă. În plus, după ce nava se întoarce, fierul navei este parțial remagnetizat, ceea ce duce și la o modificare a câmpului magnetic al navei.
 Direcția busolă (CC) numit unghiul în planul orizontului adevărat, măsurat din partea de nord a meridianului busolei în sensul acelor de ceasornic până la prova planului central al navei.
Direcția busolă (CC) numit unghiul în planul orizontului adevărat, măsurat din partea de nord a meridianului busolei în sensul acelor de ceasornic până la prova planului central al navei. Rulment busola (CP) numit unghiul în planul orizontului adevărat, măsurat din partea de nord a meridianului busolei în sensul acelor de ceasornic până la direcția către reper.
Se numește un unghi care diferă de CP cu 180° purtând busola inversă OKP: OKP = KP ± 180° sau KP = OKP ± 180° Cursurile și direcțiile busolei pot varia de la 0 la 360°.
Relația dintre busolă și direcțiile magnetice:
MK = KK + d; MP = CP + d; OMP = OKP + d;
KK = MK - d; KP = MP - d; OKP = ADM - d.
Între CC, CP și CG ale reperelor în timpul numărării circulare, rămâne următoarea relație:
KP = KK + KU;
KK = KP - KU;
KU = KP - KK.
CORECTIA COMPAS MAGNETIC.
 Suma algebrică a abaterii și a declinației magnetice, în funcție de mărimea cu care direcțiile busolei diferă de cele adevărate, se numește corecția busolei magnetice:
Suma algebrică a abaterii și a declinației magnetice, în funcție de mărimea cu care direcțiile busolei diferă de cele adevărate, se numește corecția busolei magnetice: Δ K = d + d
Abaterea și declinarea sunt luate cu semnele lor, și anume:
Dacă capătul nordic al acului magnetic este deviat de la meridianul adevărat spre dreapta (spre est), atunci declinația și abaterea se numesc est și sunt considerate pozitive, i.e. sunt substituite în formule cu semnul „+”.
Dacă capătul nordic al acului magnetic este deviat de la meridianul adevărat spre stânga (spre vest), atunci declinația și abaterea se numesc vestic și sunt considerate negative, adică. sunt substituite în formule cu semnul „-”.
Se numesc problemele asociate cu trecerea de la direcțiile și direcțiile busolei la cele adevărate corectarea romburilorși sarcinile asociate cu trecerea de la cursurile și direcțiile adevărate luate de pe hartă la cele de busolă - traducere de rhumbs.
Formule de corectare a loasturilor:
IR = KK + d + d sau IR = KK + Δ K
IP = KP + d + d sau IP = KP + Δ K
OIP = OKP + d + d sau OIP = OKP + Δ K
Formule de conversie a romburilor:
KK = IR - d - d sau KK = IR - Δ K
KP = IP - d - d sau KP = IP - Δ K
OKP = OIP - d - d sau OKP = OIP - Δ K
Convenții utilizate în sarcinile de navigare
N și - Meridianul adevărat- linia de intersecție a planului vertical care trece prin polii geografici ai Pământului și locul observatorului cu suprafața Pământului.N m - Meridian magnetic- linia de intersecție a planului orizontului adevărat cu un plan vertical care trece prin axa unui ac magnetic suspendat liber, care se află sub influența doar a forței magnetismului pământesc.
N la - Meridianul busolei- linia de intersecție a planului orizontului adevărat cu planul vertical care trece prin axa acului magnetic, care se află sub influența forței magnetismului pământesc și a forțelor magnetice ale fierului navei.
KK - curs de busolă- unghiul dintre linia meridiană a busolei Nk și linia cursului.
CP - Rulment busola- unghiul dintre linia meridiană a busolei Nk și linia de orientare.
MK - Curs magnetic- unghiul dintre meridianul magnetic N m şi linia de direcţie.
MP - Rulment magnetic- unghiul dintre linia meridiană magnetică N m şi linia de rezemare.
IR - Adevărat curs - unghiul dintre adevărata linie meridiană N și linia de direcție.
IP - purtare reală- unghiul dintre adevărata linie meridiană și linia de rezemare.
d - Abatere- unghiul dintre linia meridianului busolei N k și linia meridianului magnetic N m.
d - Declinare- unghiul dintre linia meridianului magnetic N m şi linia meridianului adevărat N i.
Δ K - Corecția busolei- unghiul dintre linia meridianului adevărat N și și linia meridianului busolei N to.
PU - Unghiul pistei- unghiul dintre linia meridianului adevărat și linia care coincide cu direcția de mers a navei.
Adevărate direcții. Cunoscând poziția adevăratului meridian (NS), orice direcție de pe suprafața pământului (mării) poate fi determinată de unghiul dintre partea de nord a acestui meridian și direcția către obiect. În acest caz, valoarea acestui unghi se măsoară în grade conform sistemului circular, adică. de la 0° la 360°.
Direcţie mișcările navei determinată de poziția planului său diametral (DP). relativ la partea de nord a adevăratului meridian. Direcția adevărată a navei (TC). Unghiul dintre partea de nord a meridianului adevărat și linia centrală a navei se numește cursul adevărat al navei ( orez. 165).
Orez. 165. Direcții adevărate
Purtarea adevărată(IP). Unghiul dintre partea de nord a meridianului adevărat și direcția către obiectul observat se numește orientare adevărată ( orez. 165). În practică, navigatorul trebuie să se ocupe de direcția inversă reală (RTB). OIP = IP ± 180°.
Unghiul de îndreptare.(KU). Unghiul dintre planul central al navei și direcția către obiectul observat se numește unghi de direcție ( orez. 165). Unghiul de direcție c se citește de la 0° la 180° și se numește: partea stângă (l/b) sau partea dreaptă (r/b), în funcție de locația obiectului față de DP. În cazul în care KU = 90°, i.e. direcția către obiect este perpendiculară pe DP, atunci acest CP se numește traversă (┴).
Pentru a calcula direcțiile adevărate, se folosesc următoarele formule:
IP = IR + KU
KU = IP - IR
IR = IP - KU
În acest caz, KU p/b are semnul „+”, iar KU l/b are semnul „-”. Datorită faptului că Pământul este un magnet imens cu poli NM și SM, forțele magnetismului plasează acul busolei în planul meridianului magnetic. Această săgeată este îndreptată la un capăt spre polul nord și celălalt spre sud. Astfel, meridianul magnetic care trece prin axa acului magnetic nu coincide cu meridianul adevărat și face un anumit unghi cu acesta, care se numește declinație magnetică ( orez. 166).
Fig. 166. Declinație magnetică
Declinație magnetică(d) - unghiul dintre părțile nordice ale meridianelor adevărate și magnetice. Dacă d este îndreptat spre est, atunci se numește miez (E) și are semnul „+”, dacă spre vest este îndreptat către est (V) și are un semn.Declinația magnetică are valori diferite pentru diferite locuri de pe suprafața pământului și, în plus, această valoare este de natură variabilă. Valorile specifice ale lui d și modificarea anuală a acesteia sunt date pentru o anumită zonă de navigație pe harta de navigație. Având în vedere că graficele sunt publicate periodic, navigatorul trebuie să țină cont de schimbarea declinației de-a lungul anilor care au trecut din anul în care a fost publicată harta și până în prezent. De exemplu, harta indică faptul că declinația magnetică (d 0) este dată anului 1990 și în această zonă valoarea ei este de 2°.5E, scăderea anuală este D d = 0°.1. Înotul a avut loc în 2000. Este necesar să se ajusteze declinarea la anul de călătorie.
unde d este declinația normalizată la anul de navigație;
n este numărul de ani (diferența dintre anul călătoriei și anul la care este dată declinația pe hartă);
∆d este modificarea anuală a declinației (are semnul „+” dacă există o creștere, un semn dacă există o scădere).
Notă: un semn „+” este plasat înainte de n dacă d este de est și „-” dacă d este de vest.
d 2000 = 2°.5 + 10(-0°.1) = + 1°.5
Răspuns: d 2000 = 1°.5E.
Alt exemplu.
Cunoscând magnitudinea declinației magnetice, este ușor de calculat direcțiile magnetice cu direcții adevărate cunoscute:
MK = IR-d,
MP = IP-d
Aceste formule sunt algebrice, așa că atunci când calculați, trebuie să țineți cont de semnul declinației.
Exemple.
Soluţie(orez. 167): MK=45°,0-(-5 °,0)=50 °,0; MP=90 °,0-(-5 °,0)=95 °,0; KU=IP-IK=MP-MK=90 °,0-45 °,0=95 °,0-50°,0=+45 °,0=45° p/b
Răspunsuri: MK = 50 °,0; MP=95°,0; KU=45 °p/b
Pe lângă magnetismul terestru pe acul magnetic busolă fierul navei, care are proprietatea de a fi magnetizat de Pământ, funcționează. În acest sens, acul busolei, sub influența fierului navei, se abate de la planul meridianului magnetic și direcția în care se află axa acului de pe navă se numește meridianul busolei. Abaterea acului busolei de pe o navă de la meridianul magnetic se numește abatere.
Deviere(δ) - unghiul dintre părțile nordice ale meridianelor magnetice și ale busolei ( orez. 169).
Fig. 169. Deviere
Când N K se abate la est de N M deviere are semnul „+”; când N K se abate la vest de Nm, abaterea are semnul „-”. Cantitatea abaterii depinde de cursul navei, sau mai degrabă pe poziția sa față de liniile magnetice de forță ale pământului și este o valoare variabilă. Dacă valoarea 8 a busolei direcționale de pe navă depășește, se iau măsuri pentru distrugerea acesteia. Distrugerea deviației este efectuată de specialiști folosind magneți și oțel moale plasați aproape de busola magnetică. Cu toate acestea, este imposibil să distrugi complet abaterea. Prin urmare, abaterea reziduală este determinată la diferite cursuri și introdusă în tabel. Există un număr suficient de moduri de a determina abaterea reziduală, dar toate se bazează pe faptul că este necesar să se stabilească diferența dintre rețelele magnetice și cele ale busolei cunoscute la un far, țintă, semn etc.
δ = MP - KP = OMP - OKP;
δ = IP - CP - d
Pentru a determina abaterea reziduală în apropierea porturilor, există locuri de testare special echipate care au mai multe aliniamente (ventilatoare) cu rulmenți magnetici cunoscuți. Trecerea liniilor la punctele principale și sferturi (8 cursuri), busolă se iau lagărele de busolă (CP). Apoi, folosind o formulă binecunoscută, se calculează valorile δ la aceste cursuri. Dacă nu există un ventilator de aliniamente, atunci abaterea poate fi determinată de la o aliniere, a cărei direcție magnetică este fie cunoscută, fie calculată din declinația magnetică cunoscută (d) și direcția reală (TI) a aliniamentului. Principiul determinării este același ca în cazul precedent.
Următoarea metodă este, de asemenea, acceptabilă pentru determinarea abaterii:
Un obiect îndepărtat este luat la o distanță de cel puțin 300 de raze de circulație; nava (barca) aflată la ancoră se întoarce și ia 8 CP la fiecare 45°; CP medie () este luată ca MP; diferența dintre MP calculat și CP luat la 8 cursuri va arăta valoarea 8 la fiecare curs. La determinarea abaterii, navigatorul trebuie să-și amintească că atunci când cursul se schimbă, harta nu ajunge imediat la meridian, așa că găsirea direcției după schimbarea cursului trebuie făcută după 3-5 minute. Pentru a obține valoarea abaterii în orice zonă de navigație, puteți folosi o barcă din lemn sau cauciuc. Luate dintr-o barcă din material nemagnetic, lagărele de pe poziții diferite vor corespunde MP, iar lagărele de pe aceleași obiecte vor corespunde barca cu motor, bărci, iahturi din același punct vor da un post de comandă. Folosind o formulă deja cunoscută, se determină valorile lui 8, care sunt prezentate în formă tabelară.
Tabelul deviației busolei magnetice
În primul rând, valorile calculate de 8 la 8 direcții (N, NE, E, SE, S, SW, W, NW) sunt introduse în tabel, iar apoi valorile sale pentru cursurile rămase sunt determinate folosind interpolarea liniară . Adesea, un tabel este compilat pentru QC la fiecare 10°, dar pentru vase mici este suficient să alcătuiești un tabel mai mare la intervale de 15°. Când se utilizează date tabelare pentru QC-uri care nu sunt enumerate în tabel, valorile 8 sunt calculate prin interpolare. De exemplu, trebuie să definiți o valoare de 8 pentru CC 25°. Din tabel pentru CC 15° δ = + 0°.5, pentru CC 30° δ = + 0°.8, i.e. la 15°(30° - 15°) Δδ = + 0°.3 (0°.8 - 0°.5). Astfel, la 1° modificare a CC în acest caz există 0,02° (0°.3: 15), și la 5° - 0°.1, la 10° - 0°.2. Aceasta înseamnă că pentru CC = 25° valoarea lui δ va fi 0°.7 (0°.5 + 0°.2; 0°.8 - 0°.1). În timpul funcționării navei, abaterea busolei trebuie determinată cât mai des posibil.
Corecție busola. Suma algebrică a declinației și abaterii magnetice se numește corecție busola. (DK).
Cu alte cuvinte, corecția busolei magnetice este unghiul dintre părțile nordice ale meridianelor adevărate și ale busolei ( orez. 170).
Orez. 170. corectare busola.a
Corectarea și translatarea rhumbs. Trecerea de la direcțiile busolei la cele adevărate se numește corecția locomoțiilor, iar tranziția de la direcțiile adevărate la direcțiile busolei se numește translația locomoțiilor.
În cazurile în care d și d sunt cunoscute, rezolvarea problemelor de corectare și traducere a rhumbs nu este dificilă.
Exemple.
№ 1 . Dat:
CC = 45°
d = 10°,
0E 8 = - 2°.0
IR = ?
Soluţie: (orez. 171)
Δ K = d + 8
Δ K = +10°.0 + (-2°.0) = +8°.0
Δ K = KK + DK = 45°.0 + 8°.0 = 53°.0
Fig. 171.
nr. 2. Dat:
IP = 125°.0
d = 15°,0W
8 = - 5°.0
KP = ?
Soluție: ( orez. 172)
Δ K = d + 8 = -15°.0 + (-5°.0) = - 20°.0
Δ P = IP - DC = 125°.0 - (-20°) = 145°.0
Răspuns:Δ K = 53°.0
Răspuns: Δ П = 145°.0
Orez. 172.
Pentru a rezolva probleme folosind o metodă grafică, se recomandă utilizarea orez. 173, iar pentru a corecta punctele busolei și a traduce direcțiile adevărate, următoarele diagrame:
|
Nume de direcții |
Procedura de determinare |
||
|
faimos |
|||
|
Scos de pe busolă atunci când se face găsirea direcției |
|||
|
Din tabelul de abateri |
|||
|
Calculat folosind formula algebrică DK = d + δ |
|||
|
Calculat folosind formula IR = KK + ΔK |
|||
|
Calculat folosind formula KP = OKP ± 180° |
|||
|
Calculat folosind formula IP = KP + ΔK |
|||
|
FORMULE (algebrice) |
IR = MK + d; IP = MP + d; |
||
|
Scos de pe card |
|||
|
Scos de pe card |
|||
|
Eliminat de pe hartă și redus la anul călătoriei (d = d0 ± n Δd) |
|||
|
Calculat folosind formula MK = IR - d |
|||
|
Calculat folosind formula MP = IP - d |
|||
|
Din tabelul de abateri pentru MK |
|||
|
DK = d + δ |
|||
|
După formula KK = IR - DK |
|||
|
După formula KK = IR - DK |
|||
|
FORMULE (algebrice |
KK = MK - 5; KP = MP - 8; |
||
 Ce suport pentru cască GoPro ar trebui să alegi?
Ce suport pentru cască GoPro ar trebui să alegi? Tipuri de impregnări de țesături și o rețetă pentru a vă face propria impregnare
Tipuri de impregnări de țesături și o rețetă pentru a vă face propria impregnare Cum să construiești un portal către iad cu propriile mâini
Cum să construiești un portal către iad cu propriile mâini