코스와 베어링이란 무엇입니까? 바다에서 방향을 결정합니다. 탐색 작업에 사용되는 규칙
선박의 이동 방향과 선박을 둘러싼 물체를 결정하는 기본 방향은 N, S, E, W의 주요 방향입니다. 이러한 주요 방향은 방향 카운트의 시작으로 간주될 수 있습니다. 항해에서는 전통적으로 진자오선(정오선)의 북쪽 또는 남쪽 부분을 방향 계산의 시작점으로 간주합니다. 정오선을 기준으로 한 방향은 탐색 문제의 성격에 따라 다양한 계산 시스템을 사용하여 최대 0.1의 정확도로 결정됩니다. ′ .
평면의 방향을 결정하려면 진정한 지평선수평선 분할에는 원형, 반원형, 분기형의 세 가지 시스템이 사용됩니다.
방향 계산을 위한 라운드 로빈 시스템
원형 시스템에서는 실제 자오선의 북쪽(북쪽) 부분이 방향 계산의 시작 부분으로 간주됩니다. 이 시스템에서는 실제 지평선의 전체 평면이 360°로 분할됩니다. 방향은 진 자오선의 북쪽 부분에서 시계 방향으로 0°에서 360°까지 계산됩니다. 시스템은 음수 값을 제공하지 않습니다.기록 형태: 37.4°.
항해에서는 방향 계산의 원형 시스템이 주요 시스템이며 선박의 이동 방향과 선박에서 보이는 물체의 방향을 결정하는 데 사용됩니다.
이 시스템에 따라 해상 방향을 결정하는 데 사용되는 모든 코스 표시기 및 도구의 눈금이 선박에서 구분됩니다.
방향을 계산하는 원형 시스템은 다른 시스템보다 더 간단하고 시각적이지만, 내비게이터는 한 시스템에 따라 주어진 방향을 다른 시스템에 따른 방향으로 변환할 수 있어야 합니다. 왜냐하면 많은 항해 및 천문학 문제를 해결할 때 이름을 나타내는 결과가 얻어지기 때문입니다. 분기의.
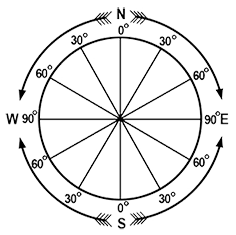
반원 방향 카운팅 시스템
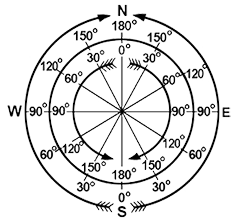 반원형 시스템에서 실제 수평선은 NS 선에 의해 각각 180°의 두 부분으로 나뉩니다. 진 자오선의 북쪽(N) 부분과 남쪽(S) 부분을 모두 계산 방향(0°)의 시작점으로 간주합니다. 모든 경우에 계수는 축(E) 또는 서쪽(W)을 기준으로 0°에서 180°까지 수행됩니다.
반원형 시스템에서 실제 수평선은 NS 선에 의해 각각 180°의 두 부분으로 나뉩니다. 진 자오선의 북쪽(N) 부분과 남쪽(S) 부분을 모두 계산 방향(0°)의 시작점으로 간주합니다. 모든 경우에 계수는 축(E) 또는 서쪽(W)을 기준으로 0°에서 180°까지 수행됩니다. 모호함을 피하기 위해 반원형 계산 시스템의 방향에는 이름이 지정됩니다.
첫째, 문자 N 또는 S는 방향이 측정되는 실제 자오선 부분을 나타냅니다.
- 숫자는 각도 값을 도 단위로 표시합니다.
- 기록 끝에서 문자 E 또는 W는 카운트가 이루어지는 방향을 나타냅니다.
실제 방향에 자기 변화를 더하거나 빼서 이를 수행합니다. 실제 항공 세계에서의 삶은 좀 더 복잡합니다. 지상풍은 자북을 기준으로 보고되고, 공중풍은 진북을 기준으로 보고됩니다. 그러나 비행 시뮬레이션 조종사는 비행을 계획할 때 주로 자기 방향에 대한 정보를 얻으므로 공기 중의 바람에 대한 자북은 하나의 변환 요소를 제거하여 계산을 더 쉽게 만들었습니다.
이는 항공사에게 획기적인 발전이었으며 날씨를 거의 고려하지 않고 일정을 만들 수 있게 되었습니다. 다음 섹션에서 모든 것이 어떻게 시작되었는지 읽어보세요. 항로 보조 장치의 초기 개발에 대해 알아보세요. 개척자는 새로운 의미를 갖게 될 것입니다. 학교의 철학 강좌를 유지하고, 개편하고, 제거하고, 대체해야 합니까? 편집장, Beatrice Delvaux는 나에게 저녁의 "빨간 실"이 되어달라고 요청했습니다.
예: N65°E, S135°W.
분기 방향 계산 시스템
 쿼터 시스템에서 실제 지평선의 평면은 NS 및 EW 선(NE, SE, SW 및 NW)에 의해 4개의 쿼터로 나뉩니다.
쿼터 시스템에서 실제 지평선의 평면은 NS 및 EW 선(NE, SE, SW 및 NW)에 의해 4개의 쿼터로 나뉩니다. 실제 자오선의 북쪽(N) 또는 남쪽(S) 부분을 방향(0°) 계산의 시작점으로 사용합니다. 계산은 매 분기마다 0°에서 90°까지 N 또는 S에서 E 또는 W 방향으로 수행됩니다.
NE 구역에서는 N에서 E(시계 방향)로 0°에서 90°까지;
- SE 분기에서 S에서 E까지(시계 반대 방향) 0°에서 90°까지;
- 남서쪽 분기에서 S에서 W(시계 방향)로 0°에서 90°까지;
- NW 분기에서 N에서 W(시계 반대 방향)로 0°에서 90°까지.
우리 토론에서 어떤 인상을 받았나요? 처음에 나는 이른바 '철학' 과목이 학생들을 분리한다는 문제에 놀랐다. 이 과정에 대한 또 다른 주요 비판은 일관성입니다. 그렇다면 우리가 시민권에 대해 이야기할 때 실제로 법에 대해 이야기하고 있는 걸까요? 그 중 어느 하나는 완전히 개방적이고 완전히 다원적이며 상대주의에 빠질 수 있습니다. 또는 우리는 약간의 시민권, 약간의 인권, 약간의 종교 등을 뿌립니다. - 이 경우 코스는 일관성이 없고 흥미롭지 않게 됩니다.
간단히 말해서 우리는 어느 발로 춤을 추어야 할지 잘 알지 못한다는 것을 알 수 있습니다. 비판이 제기되었으며 아무도 교사에게 질문하지 않습니다. 그게 요점은 아니지만 우리는 새 코스의 목표로 무엇을 할당하고 싶은지 정확히 알지 못합니다. 우리는 이러한 새로운 강좌를 너무 많이 기대하고 있지 않습니까?
모호함을 피하기 위해 분기 방향을 작성할 때 해당 방향이 위치한 분기의 이름을 표시하십시오.
 예: NE70.1°; SW38.3°; NW76.9°; SE70.0°.
예: NE70.1°; SW38.3°; NW76.9°; SE70.0°.
실제로, 주어진 방향이 다른 계산 시스템으로 표시되면 먼저 하나의 시스템으로 변환됩니다. 이 경우 다양한 방향 재계산 방식이 사용되며 그 중 하나가 그림에 표시됩니다.
진정한 코스와 방향. 방향 각도.
 해상에서 선박의 안전을 보장하려면 주어진 경로에 대한 선박의 이동 방향뿐만 아니라 선박에서 볼 수 있는 항해 위험 및 랜드마크에 대한 방향을 결정할 수 있어야 합니다.
해상에서 선박의 안전을 보장하려면 주어진 경로에 대한 선박의 이동 방향뿐만 아니라 선박에서 볼 수 있는 항해 위험 및 랜드마크에 대한 방향을 결정할 수 있어야 합니다. 바다에서의 방향은 다음을 기준으로 결정됩니다. 실제 자오선은 관찰자의 위치를 통과하는 자오선입니다." style="cursor: help; 글꼴 두께:800; 글꼴 스타일:기울임꼴; 색상:#2e44b7; text-장식:none"> 실제 자오선(N 및)라고 불립니다. 진정한 방향. 실제 자오선의 위치를 알면 지구 표면(바다)의 모든 방향은 이 자오선의 북쪽 부분과 물체를 향하는 방향 사이의 각도에 의해 결정될 수 있습니다. 이 경우 이 각도의 값은 원형 시스템에 따라 각도로 측정됩니다. 0°에서 360°까지.
선박의 이동 방향은 실제 방향에 따라 결정됩니다.
진정한 코스(IR)은 실제 자오선과 북쪽 부분 사이의 수평각입니다. 직경 평면은 선박 선체 대칭의 수직 세로 평면입니다." style="cursor: help; 글꼴 두께:800; 글꼴 스타일:기울임꼴; 색상:#2e44b7; 텍스트 장식:없음"> 중앙 평면선박의 이동 방향을 시계 방향으로 측정합니다.
평면과 교차하는 직경 평면 진정한 지평선은 수평면이다. 관찰자의 눈을 통해 통과" style="커서: 도움말; 글꼴 두께:800; 글꼴 스타일:기울임꼴; 색상:#2e44b7; 텍스트 장식:없음">진정한 지평선, 선박의 항로선을 형성합니다. 따라서 실제 IR 코스는 실제 자오선의 북쪽 부분과 코스 라인 사이의 각도입니다. 실제 환율은 순환 계산 시스템으로 계산됩니다.
관측점에서 물체까지의 방향을 이라 한다. 베어링 라인.
선박에서 자연 및 인공 물체까지의 방향은 실제 방위에 따라 결정됩니다.
진정한 베어링(IP)는 진 자오선의 북쪽 부분과 관찰 지점에서 물체까지의 방향 사이의 수평 각도로 시계 방향으로 측정됩니다.
관찰자가 있는 곳과 관찰된 물체가 있는 곳을 지나는 수직면을 수직면이라 한다. 조준기.
조준면과 실제 수평선의 교차점이 형성됩니다. 베어링 라인, 이는 물체의 방향입니다. 따라서, 진정한 베어링(IP)는 실제 자오선의 북쪽 부분과 방위선 사이의 각도입니다. 실제 베어링은 원형 계산 시스템으로 계산됩니다.
특정 문제를 해결할 때 실제 베어링과 반대 방향이 사용됩니다. 이 방향을 이라고 합니다 역진 베어링(OIP):
OIP = IP + 180°, IP인 경우 OIP = IP - 180°, IP > 180°인 경우.
OIP는 랜드마크를 통과하는 진자오선 북쪽에서 시계방향으로 측정한 각도입니다. 기준점에서 선박까지.
특히 중요한 문제를 해결할 때 상호 합의선박의 경로와 관찰된 물체, 측정 헤딩 각도(KU) - 용기의 중심선 평면과 관찰된 물체를 향한 방향 사이의 수평 각도, 즉 선박 중심선의 뱃머리와 베어링 라인 사이의 각도. 헤딩 각도원형 또는 반원형 방향 계수 시스템으로 측정됩니다.
기본적으로 선수각은 반원형 시스템으로 측정되며 모호함을 피하기 위해 선박의 어느 쪽(오른쪽 또는 왼쪽)을 계산했는지 나타내는 이름이 지정됩니다.
예: KU= 15° l/b, KU= 78° p/b.
문제를 해결할 때 우현의 선수각을 고려합니다. 긍정적인, 왼쪽의 헤딩 각도가 고려됩니다. 부정적인.
일부 문제를 해결하려면 원형 계정에서 방향 각도를 측정해야 합니다. 이 경우, 계수는 선박 중심선 평면의 뱃머리에서 오른쪽으로 0°에서 360°까지 수행됩니다. 원형 계정에서 측정된 방향 각도를 호출합니다. 방향 각도 참조(OKU).  헤딩 각도 판독값과 헤딩 각도 사이의 관계는 다음 표현식에 의해 결정됩니다.
헤딩 각도 판독값과 헤딩 각도 사이의 관계는 다음 표현식에 의해 결정됩니다.
OKU = CU p/b;
OKU = 360° - KU l/b
방향 각도의 일부 값은 전통적으로 이름이 지정됩니다. 예를 들어, KU = 90°(선박의 중심선 평면에 수직인 방향)이라고 합니다. 에빔.
실제 방향 간의 수학적 관계:
IP = IR + KU;
IR = IP - 쿠;
KU = IP - IR.
이러한 공식을 사용하여 계산할 때 방향 각도의 부호를 고려해야 한다는 점을 기억해야 합니다. 또 다른 특징은 진방향과 진방위가 음수 값을 가질 수 없다는 것입니다. 그러나 문제를 해결할 때 음의 IC 또는 IP 값이 얻어지면 이를 360°에서 빼야 하며 얻은 결과는 양의 것으로 간주되어야 합니다.
실제 자오선 평면의 북쪽 부분과 선박의 이동 선과 일치하는 수직면 사이의 2면각을 호출합니다. 트랙 각도(PU).
문제 해결의 예
|
예시 1:
IR = 270°, 해결책: IP=IR+KU=270°+130°= 400° 왜냐하면 결과가 360°보다 큰 것으로 판명되면 얻은 결과에서 360°를 빼야 합니다. 400° - 360° = 40° 답: IP = 40°. |
예시 2:
IR = 40°, 해결책: 왜냐하면 왼쪽 각도는 음수로 간주됩니다. IP=IR+KU=40°+ (-70°)= -30° 왜냐하면 부정적인 결과를 얻으면 얻은 값에 360°를 더해야 합니다. –30° + 360° = 330° 답: IP = 330°. |
예시 3:
IP = 340°, 해결책: KU=IP-IR=340°- 40°=300°pr/b 왜냐하면 KU 값이 180°보다 큰 것으로 판명되면 얻은 결과에서 360°를 빼고 KU 이름(pr/b)을 반대(l/b)로 변경해야 합니다. 360° - 300° = 60° l/b 답: KU = 60° l/b. |
자기 편각. 자기 코스 및 베어링.
지구의 자극은 지리적으로 상대적으로 가깝지만 일치하지는 않습니다. 또한 점차적으로 위치가 변경됩니다.지구 자기력의 영향을 받아 자유롭게 매달린 자침의 축을 통과하는 수직면을 다음과 같이 부릅니다. 자오선의 평면, 그리고 이 평면과 실제 지평선의 평면이 교차하는 선은 다음과 같습니다. 자오선.
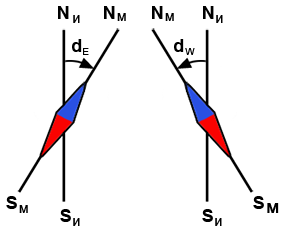 지구의 특정 지점에서 자기 자오선 평면이 실제 자오선 평면에서 벗어나는 수평각을 호출합니다. 자기 편각 d. 이는 실제 자오선 N의 북쪽 부분에서 0°에서 180°까지 E 또는 W 방향으로 측정됩니다. 자기 자오선 Nm의 북쪽 부분이 N에서 동쪽으로 벗어난 경우 적위를 E(동부)라고 하며 더하기 기호(+)가 지정되고, 서쪽이면 W(서부)가 지정됩니다. 빼기 기호(-).
지구의 특정 지점에서 자기 자오선 평면이 실제 자오선 평면에서 벗어나는 수평각을 호출합니다. 자기 편각 d. 이는 실제 자오선 N의 북쪽 부분에서 0°에서 180°까지 E 또는 W 방향으로 측정됩니다. 자기 자오선 Nm의 북쪽 부분이 N에서 동쪽으로 벗어난 경우 적위를 E(동부)라고 하며 더하기 기호(+)가 지정되고, 서쪽이면 W(서부)가 지정됩니다. 빼기 기호(-). 지구상의 개별 지점에서 자기 편각은 값과 이름이 모두 다릅니다. 대부분의 항해 가능한 지역에서 적위는 25°E 또는 W를 초과하지 않습니다. 고위도에서는 예외적으로 적위가 수십도에 도달할 수 있으며 동일한 이름의 자기 극과 지리적 극 사이에서는 심지어 180°까지 도달할 수 있습니다.
자기 나침반을 올바르게 사용하려면 항해 지역의 자기 편각을 알아야 합니다. 이를 위해 내비게이션 지도에는 적위의 값과 이름이 표시됩니다. 그러나 같은 장소에서도 적위 값이 일정하게 유지되지 않는 것으로 관찰되었습니다. 일부 지역에서는 적위가 1년 동안 0.2~0.3°까지 바뀔 수 있습니다. 따라서 항법 차트에는 적위가 지정된 연도와 연간 변화 값도 표시됩니다.
1년에 걸친 자기편각의 변화량을 말한다. 자기 편각의 연간 변화평균은 0.0°~0.2°입니다.
항법 해도 작업 과정에서 항법 연도에 대한 자기 편각을 조정해야 합니다. 이렇게 하려면 지도에 표시된 자기 편각 값(자체 기호 포함)에 연간 변화 값(자체 기호 포함)과 해당 연도로부터 경과된 연수를 더합니다. 실제 항해 연도에 편각이 할당됩니다. 예를 들면 다음과 같습니다.
지도는 다음을 나타냅니다.
자기 편각 5.7°E, 2000년으로 정규화됨. 연간 변화는 W로 0.1°
그러면 2014년 항해의 자기 편각은 다음과 같습니다.
d 2004 = + 5.7 + [(- 0.1 × (2014 - 2000)] = + 5.7 - 0.1 × 14 = 5.7 - 1.4 = 4.3°.
 마그네틱 코스(MK)는 자기 자오선의 북쪽 부분에서 시계 방향으로 선박 중심선 평면의 뱃머리까지 측정된 실제 수평선 평면의 각도입니다.
마그네틱 코스(MK)는 자기 자오선의 북쪽 부분에서 시계 방향으로 선박 중심선 평면의 뱃머리까지 측정된 실제 수평선 평면의 각도입니다. 자기 베어링(MP)는 자기 자오선의 북쪽 부분에서 시계 방향으로 랜드마크 방향까지 측정한 실제 지평선 평면의 각도입니다.
MP와 180° 다른 각도를 호출합니다. 역방향 자기 베어링(WMP): WMP = MP ± 180° 또는 MP = WMP ± 180°.
자기 코스와 베어링의 범위는 0~360°입니다.
지구상의 특정 위치에서 자기 편각을 알면 알려진 자기 방향으로부터 실제 자기 방향을 얻을 수 있으며 역 문제도 해결할 수 있습니다. 자기 방향과 실제 방향 사이의 관계는 다음 공식으로 표현됩니다.
IR = MK + d; IP = MP + d; OIP = OMP + d;
MK = IR - d; MP = IP - d; 대량살상무기 = OIP - d.
자기 나침반의 편차. 나침반 코스 및 베어링.
지구 자기력과 선박 철의 자기력의 영향을받는 자침의 축을 통과하는 수직면과 실제 지평선 평면의 교차선을 호출합니다. 나침반 자오선.지구 자기장에 위치한 선박의 세트 부품 및 기타 강철 및 철 부품은 점차 자화되어 자석의 특성을 얻습니다. 결과적으로 선박 주변 공간에 자체 자기장이 나타나고 그 효과는 지구 자기장과 결합됩니다. 선박 나침반의 자침은 두 자기장의 합력에 따라 설정되며 그 결과 자오선의 방향에서 벗어납니다.
 나침반 자오선의 평면이 자기 자오선의 평면에서 벗어나는 수평각을 호출합니다. 자기나침반 편차 d.
나침반 자오선의 평면이 자기 자오선의 평면에서 벗어나는 수평각을 호출합니다. 자기나침반 편차 d.편차는 자오선 Nm의 북쪽 부분에서 E("+" 기호 포함) 또는 W("-" 기호 포함)까지 0에서 180°까지 측정됩니다.
각 코스마다 선박의 나침반 편차가 다릅니다. 이는 코스가 변경되면 자기 나침반 바늘에 대한 선박 철의 위치가 변경된다는 사실로 설명됩니다. 또한 배가 선회한 후 배의 철이 부분적으로 재자화되어 배의 자기장의 변화도 발생합니다.
 나침반 방향(CC)나침반 자오선의 북쪽 부분에서 시계 방향으로 배의 중앙 평면의 뱃머리까지 측정된 실제 지평선 평면의 각도라고 합니다.
나침반 방향(CC)나침반 자오선의 북쪽 부분에서 시계 방향으로 배의 중앙 평면의 뱃머리까지 측정된 실제 지평선 평면의 각도라고 합니다. 나침반 베어링(CP)나침반 자오선의 북쪽 부분에서 시계 방향으로 랜드마크 방향까지 측정한 실제 지평선 평면의 각도라고 합니다.
CP와 180° 다른 각도를 호출합니다. 역나침반 베어링 OKP: OKP = KP ± 180° 또는 KP = OKP ± 180° 나침반 방향과 방위의 범위는 0 ~ 360°입니다.
나침반과 자기 방향의 관계:
MK = KK + d; MP = CP + d; OMP = OKP + d;
KK = MK - d; KP = MP - d; OKP = 대량살상무기 - d.
순환 계산 중 랜드마크의 CC, CP 및 CG 사이에는 다음 관계가 유지됩니다.
KP = KK + KU;
KK = KP - 쿠;
KU = KP - KK.
자기 나침반 수정.
 나침반 방향이 실제 방향과 다른 정도에 따른 편차와 자기 편각의 대수적 합을 자기 나침반 수정이라고 합니다.
나침반 방향이 실제 방향과 다른 정도에 따른 편차와 자기 편각의 대수적 합을 자기 나침반 수정이라고 합니다. ΔK = d + d
편차와 편각은 다음과 같은 자체 기호로 표시됩니다.
자침의 북쪽 끝이 실제 자오선에서 오른쪽(동쪽)으로 벗어나면 적위와 편차를 동부라고 하며 양수로 간주됩니다. "+" 기호가 있는 수식으로 대체됩니다.
자침의 북쪽 끝이 실제 자오선에서 왼쪽(서쪽)으로 벗어나면 적위와 편차를 서쪽이라고 하며 음수로 간주됩니다. "-" 기호가 있는 수식으로 대체됩니다.
나침반 코스와 베어링에서 실제 방향으로의 전환과 관련된 문제를 호출합니다. 마름모 수정, 지도에서 가져온 실제 코스와 방위에서 나침반으로 전환하는 것과 관련된 작업- 운문의 번역.
마름모꼴 수정 공식:
IR = KK + d + d 또는 IR = KK + Δ K
IP = KP + d + d 또는 IP = KP + Δ K
OIP = OKP + d + d 또는 OIP = OKP + Δ K
마름모를 변환하는 공식:
KK = IR - d - d 또는 KK = IR - Δ K
KP = IP - d - d 또는 KP = IP - Δ K
OKP = OIP - d - d 또는 OKP = OIP - Δ K
탐색 작업에 사용되는 규칙
N 및 - 진정한 자오선- 지구의 지리적 극과 관찰자의 위치를 통과하는 수직면과 지구 표면의 교차선.Nm - 자오선- 실제 지평선 평면과 자유롭게 매달린 자기 바늘의 축을 통과하는 수직 평면의 교차선으로, 지구 자기력의 영향만 받습니다.
N ~ - 나침반 자오선- 실제 지평선 평면과 자기 바늘의 축을 통과하는 수직 평면의 교차선. 이는 지구 자기력과 선박 철의 자기력의 영향을 받습니다.
KK - 나침반 코스- 나침반 자오선 Nk와 방향선 사이의 각도.
CP - 나침반 베어링- 나침반 자오선 Nk와 방위선 사이의 각도.
MK - 자기 코스- 자기 자오선 Nm과 방향선 사이의 각도.
MP - 자기 베어링- 자기 자오선 N m과 베어링 선 사이의 각도.
IR - 진정한 코스 - 실제 자오선 N과 방향선 사이의 각도.
IP - 실제 베어링- 실제 자오선과 방위선 사이의 각도.
d - 편차-나침반 자오선 N k와 자기 자오선 N m 사이의 각도.
d - 경사- 자기 자오선 N m 선과 실제 자오선 N i 선 사이의 각도.
Δ K - 나침반 교정- 실제 자오선 N 선과 나침반 자오선 N 선 사이의 각도입니다.
PU - 트랙 각도- 진자오선과 선박의 항로 방향과 일치하는 선 사이의 각도.
진정한 방향. 실제 자오선(NS)의 위치를 알면 지구 표면(바다)의 모든 방향은 이 자오선의 북쪽 부분과 물체를 향하는 방향 사이의 각도에 의해 결정될 수 있습니다. 이 경우 이 각도의 값은 원형 시스템에 따라 각도로 측정됩니다. 0°에서 360°까지.
방향 선박 이동직경 평면(DP)의 위치에 따라 결정됩니다. 실제 자오선의 북쪽 부분에 상대적입니다. 선박의 진방위(TC). 진자오선의 북쪽 부분과 배의 중심선 사이의 각도를 배의 진로라고 합니다( 쌀. 165).
쌀. 165.진정한 방향
진정한 베어링(IP). 진자오선의 북쪽 부분과 관찰된 물체를 향하는 방향 사이의 각도를 진방위( 쌀. 165). 실제로 내비게이터는 역진방위(RTB)를 처리해야 합니다. OIP = IP ± 180°.
방향 각도.(KU). 선박의 중심면과 관찰되는 물체를 향하는 방향 사이의 각도를 표제각(heading angle)이라고 합니다. 쌀. 165). 헤딩 각도 c는 0°에서 180°까지 판독되며 DP를 기준으로 한 물체의 위치에 따라 왼쪽(l/b) 또는 오른쪽(r/b)으로 명명됩니다. KU = 90°인 경우, 즉 물체를 향한 방향이 DP에 수직이면 이 CP를 트래버스(┴)라고 합니다.
실제 방향을 계산하려면 다음 공식이 사용됩니다.
IP = IR + 쿠
KU = IP - IR
IR = IP - 쿠
이 경우 KU p/b에는 "+" 기호가 있고 KU l/b에는 "-" 기호가 있습니다. 지구는 극 NM과 SM을 가진 거대한 자석이기 때문에 자기력으로 인해 나침반 바늘이 자오선 평면에 위치하게 됩니다. 이 화살표는 한쪽 끝은 북극을 향하고 다른 쪽 끝은 남쪽을 향합니다. 따라서 자침의 축을 통과하는 자오선이 진자오선과 일치하지 않고 일정한 각도를 이루는 것을 자기편각( 쌀. 166).
그림 166. 자기 편각
자기 편각(d) - 실제 자오선과 자오선의 북쪽 부분 사이의 각도. d가 동쪽을 향하면 코어(E)라고 하며 "+" 기호가 있고, 서쪽이면 동쪽(W)을 향하고 기호가 있습니다. 자기 편각은 다음과 같은 값을 갖습니다. 지구 표면의 다른 위치 그리고 또한 이 값은 가변적 성격입니다. 항법도의 특정 항법 영역에 대한 d의 구체적인 값과 연간 변화가 제공됩니다. 해도가 주기적으로 발행된다는 점을 고려하면, 내비게이터는 지도가 발행된 해부터 현재까지 지난 몇 년간의 적위 변화를 고려해야 합니다. 예를 들어, 지도는 자기 편각(d 0)이 1990년에 주어졌고 이 지역의 값은 2°.5E이고 연간 감소는 D d = 0°.1임을 나타냅니다. 수영은 2000년에 열렸습니다. 항해 연도에 따라 적위를 조정할 필요가 있습니다.
여기서 d는 항해 연도로 표준화된 적위입니다.
n은 연수(항해 연도와 지도에 적위가 표시된 연도 간의 차이)입니다.
Δd는 적위의 연간 변화입니다(증가하는 경우 "+" 기호, 감소하는 경우 기호가 있음).
메모: d가 동부인 경우 "+" 기호가 n 앞에 배치되고 d가 서부인 경우 "-" 기호가 배치됩니다.
d 2000 = 2°.5 + 10(-0°.1) = + 1°.5
답변: d 2000 = 1°.5E.
다른 예시.
자기 편각의 크기를 알면 알려진 실제 방향으로 자기 방향을 쉽게 계산할 수 있습니다.
MK = IR-d,
MP = IP-d
이 공식은 대수적이므로 계산할 때 편각의 부호를 고려해야 합니다.
예.
해결책(쌀. 167): MK=45°,0-(-5 °,0)=50 °,0; MP=90 °,0-(-5 °,0)=95 °,0; KU=IP-IK=MP-MK=90 °,0-45 °,0=95 °,0-50°,0=+45 °,0=45°p/b
답변: MK = 50 °,0; MP=95°,0; 구=45 °p/b
자침에는 지자기 외에 나침반지구에서 자화되는 성질을 가진 선박 철이 작동합니다. 이와 관련하여 나침반 바늘은 선박의 철의 영향을 받아 자기 자오선 평면에서 벗어나고 선박 바늘의 축이 위치한 방향을 나침반 자오선이라고 합니다. 선박의 나침반 바늘이 자오선에서 벗어나는 것을 편차라고 합니다.
편차(δ) - 자기 자오선과 나침반 자오선의 북쪽 부분 사이의 각도( 쌀. 169).
그림 169. 편차
N K가 N M의 동쪽으로 벗어날 때 편차"+" 기호가 있고, N K가 Nm의 서쪽으로 벗어나면 편차에는 "-" 기호가 있습니다. 편차의 정도는 다음에 따라 다릅니다. 배의 항로, 또는 오히려 지구의 자력선에 상대적인 위치에 있으며 가변 값입니다. 선박의 방향 나침반 값이 8을 초과하면 이를 파괴하는 조치가 취해집니다. 편차의 파괴는 자기 나침반 가까이에 위치한 자석과 연강을 사용하여 전문가가 수행합니다. 그러나 일탈을 완전히 파괴하는 것은 불가능하다. 따라서 다양한 코스에서 잔여 편차가 결정되어 표에 입력됩니다. 잔여 편차를 결정하는 방법에는 여러 가지가 있지만 모두 등대, 표적, 표지판 등에 대해 알려진 자기 방위와 나침반 방위 사이의 차이를 확립해야 한다는 사실에 기초합니다.
δ = MP - KP = OMP - OKP;
δ = IP - CP - d
포트 근처의 잔류 편차를 확인하기 위해 알려진 자기 베어링과 여러 가지(팬) 정렬이 있는 특수 장비를 갖춘 테스트 사이트가 있습니다. 메인포인트와 쿼터포인트(8코스)에서 선을 넘으며, 나침반나침반 베어링(CP)이 사용됩니다. 그런 다음 잘 알려진 공식을 사용하여 해당 코스의 δ 값을 계산합니다. 정렬의 팬이 없는 경우 편차는 하나의 정렬에서 결정될 수 있으며, 자기 방향은 알려져 있거나 알려진 자기 편각(d) 및 정렬의 실제 방향(TI)으로부터 계산됩니다. 결정의 원칙은 이전 사례와 동일합니다.
편차를 결정하기 위해 다음 방법도 허용됩니다.
최소 300 순환 반경의 거리에서 먼 물체를 촬영합니다. 정박 중인 선박(보트)은 방향을 바꾸고 45°마다 8 CP를 받습니다. 평균 CP()를 MP로 하고, 계산된 MP와 8개 코스에서 수강한 CP의 차이는 각 코스마다 8의 값을 나타내게 된다. 편차를 판단할 때 항법사는 항로가 변경되면 지도가 바로 자오선에 도착하지 않으므로 항로 변경 후 방향 탐색은 3~5분 후에 이루어져야 한다는 점을 기억해야 한다. 항해 지역의 편차 값을 얻으려면 나무 또는 고무 보트를 사용할 수 있습니다. 비자성체로 만든 보트에서 채취한 서로 다른 방향의 방위는 MP에 해당하고 동일한 물체의 방위는 MP에 해당합니다. 모터 보트, 같은 지점의 보트, 요트가 지휘소를 제공합니다. 이미 알려진 공식을 사용하여 8의 값이 결정되며 이는 표 형식으로 표시됩니다.
자기나침반 편차표
먼저 8개 방향(N, NE, E, SE, S, SW, W, NW)에서 계산된 8개의 값을 테이블에 입력하고 나머지 코스에 대한 값을 선형보간법을 이용하여 결정한다. . 종종 표는 10°마다 QC를 위해 작성되지만 작은 선박 15° 간격으로 더 큰 테이블을 컴파일하는 것으로 충분합니다. 표에 나열되지 않은 QC에 대해 표 형식 데이터를 사용하는 경우 값 8은 보간법을 사용하여 계산됩니다. 예를 들어 CC 25°의 경우 값을 8로 정의해야 합니다. CC 15° δ = + 0°.5에 대한 표에서, CC 30° δ = + 0°.8에 대해, 즉 15°(30° - 15°)에서 Δδ = + 0°.3(0°.8 - 0°.5). 따라서 이 경우 CC의 1° 변화당 0.02°(0°.3: 15)가 있고 5°당 - 0°.1, 10°당 - 0°.2가 있습니다. 이는 CC = 25°의 경우 δ 값이 0°.7(0°.5 + 0°.2; 0°.8 - 0°.1)이 됨을 의미합니다. 선박 운항 중에 나침반 편차를 최대한 자주 확인해야 합니다.
나침반 교정. 자기 편각과 편차의 대수적 합을 나침반 보정이라고 합니다. (DK).
즉, 자기나침반 보정은 진경선과 나침반 자오선의 북쪽 부분 사이의 각도( 쌀. 170).
쌀. 170. 나침반 교정.a
마름모꼴의 수정 및 번역.나침반 방향에서 참 방향으로의 전환을 마름모 수정이라고 하며, 참 방향에서 나침반 방향으로의 전환을 마름모 이동이라고 합니다.
d와 d가 알려진 경우, 마름모를 수정하고 번역하는 문제를 해결하는 것은 어렵지 않습니다.
예.
№ 1 . 주어진:
CC = 45°
d = 10°,
0E 8 = - 2°.0
IR = ?
해결책: (쌀. 171)
ΔK = d + 8
Δ K = +10°.0 + (-2°.0) = +8°.0
Δ K = KK + DK = 45°.0 + 8°.0 = 53°.0
그림 171.
2번. 주어진:
IP = 125°.0
d = 15°,0W
8 = - 5°.0
KPC = ?
해결책: ( 쌀. 172)
Δ K = d + 8 = -15°.0 + (-5°.0) = - 20°.0
Δ P = IP - DC = 125°.0 - (-20°) = 145°.0
답변:ΔK = 53°.0
답변: Δ П = 145°.0
쌀. 172.
그래픽 방법을 사용하여 문제를 해결하려면 다음을 사용하는 것이 좋습니다. 쌀. 173, 나침반 점을 수정하고 실제 방향을 변환하기 위해 다음 다이어그램을 참조하세요.
|
길찾기 이름 |
결정 절차 |
||
|
유명한 |
|||
|
방향 탐색 시 나침반에서 제거됨 |
|||
|
편차표에서 |
|||
|
대수 공식 DK = d + δ를 사용하여 계산됩니다. |
|||
|
IR = KK + ΔK 공식을 사용하여 계산됩니다. |
|||
|
KP = OKP ± 180° 공식을 사용하여 계산됩니다. |
|||
|
IP = KP + ΔK 공식을 사용하여 계산됩니다. |
|||
|
공식(대수) |
IR = MK + d; IP = MP + d; |
||
|
카드에서 삭제됨 |
|||
|
카드에서 삭제됨 |
|||
|
지도에서 제거되고 항해 연도로 축소됨(d = d0 ± n Δd) |
|||
|
MK = IR - d 공식을 사용하여 계산됩니다. |
|||
|
MP = IP - d 공식을 사용하여 계산됩니다. |
|||
|
MK의 편차표에서 |
|||
|
DK = d + δ |
|||
|
공식에 따르면 KK = IR - DK |
|||
|
공식에 따르면 KK = IR - DK |
|||
|
공식(대수 |
KK = MK - δ; KP = MP - 8; |
||
 Rav, Rabbi, Rebbe - 그는 누구입니까?
Rav, Rabbi, Rebbe - 그는 누구입니까? 아벨라르의 철학 - 개념주의
아벨라르의 철학 - 개념주의 큰 자개 또는 큰 숲 자개 나비 자개는 어떻게 생겼습니까?
큰 자개 또는 큰 숲 자개 나비 자개는 어떻게 생겼습니까?